如图14所示,两根足够长的固定平行金属光滑导轨位于同一水平面,导轨上横放着两根相同的导体棒ab、cd与导轨构成矩形回路.导体棒的两端连接着处于压缩状态的两根轻质弹簧,两棒的中间用细线绑住,它们的电阻均为R,回路上其余部分的电阻不计.在导轨平面内两导轨间有一竖直向下的匀强磁场,开始时,导体棒处于静止状态.剪断细线后,导体棒在运动过程中( )
图14
| A.回路中有感应电动势 |
| B.两根导体棒所受安培力的方向相同 |
| C.两根导体棒和弹簧构成的系统动量守恒、机械能守恒 |
| D.两根导体棒和弹簧构成的系统动量守恒、机械能不守恒 |
一质点由静止开始做匀加速直线运动,它在第10s内的位移为19m,则其加速度大小为()
| A.1.9m/s2 | B.2.0m/s2 | C.9.5m/s2 | D.3.0m/s2 |
一辆公共汽车进站后开始刹车.做匀减速直线运动,开始刹车后的第1s内和第3s内位移大小依次为13m和9m,则刹车后6s内的位移是()
| A.48 m | B.24 m | C.25 m | D.75 m |
一小球自地面上方某高度处自由下落,测得小球在最后1s内的位移是35m,不计空气阻力,g取10m/s2,则()
| A.小球从释放到落地的时间为5s |
| B.小球从释放到落地的时间为4s |
| C.小球释放点距地面的高度为125m |
| D.小球到达地面时速度为50m/s |
下列关于路程和位移的说法正确的是()
| A.路程是标量,只有大小,没有方向,位移是矢量只有方向没有大小 |
| B.给定初末位置,路程有无数种可能,位移只有两种可能 |
| C.若物体作直线运动,位移就等于路程 |
| D.位移是物体运动径迹的长度,路程描述了物体位置移动的方向和距离 |
某物体沿一直线运动,其v﹣t图象如图所示,则下列说法中不正确的是()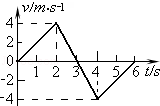
| A.第2s内和第3s内速度方向相反 |
| B.第2s内和第3s内的加速度方向相反 |
| C.第3s内速度方向与加速度方向相反 |
| D.第5s内速度方向与加速度方向相反 |