如图所示,电源的电动势和内阻分别为E、r,在滑动变阻器的滑片P由a向b移动的过程中,电流表、电压表的示数变化情况为( )
| A.电流表先减小后增大,电压表先增大后减小 |
| B.电流表先增大后减小,电压表先减小后增大 |
| C.电流表一直减小,电压表一直增大 |
| D.电流表一直增大,电压表一直减小 |
【2015·上海·10】用很弱的光做单缝衍射实验,改变曝光时间,在胶片上出现的图像如图所示,该实验表明
| A.光的本质是波 |
| B.光的本质是粒子 |
| C.光的能量在胶片上分布不均匀 |
| D.光到达胶片上不同位置的概率相同 |
【2015·北京·21(1)】“测定玻璃的折射率”的实验中,在白纸上放好玻璃砖, 和
和 分别是玻璃砖与空气的两个界面,如图所示,在玻璃砖的一侧插上两枚大头针
分别是玻璃砖与空气的两个界面,如图所示,在玻璃砖的一侧插上两枚大头针 和
和 ,用“+”表示大头针的位置, 然后在另一侧透过玻璃砖观察,并依次插上大头针
,用“+”表示大头针的位置, 然后在另一侧透过玻璃砖观察,并依次插上大头针 和
和 ,在插和时,应使 (选填选项前的字母)
,在插和时,应使 (选填选项前的字母)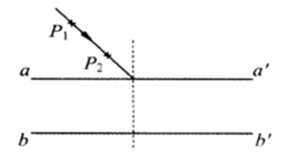
A.只挡住的像
B.只挡住的像
C.同时挡住、的像
【2015·四川·3】直线P1P2过均匀玻璃球球心O,细光束a、b平行且关于P1P2对称,由空气射入玻璃球的光路如图。a、b光相比
| A.玻璃对a光的折射率较大 |
| B.玻璃对a光的临界角较小 |
| C.b光在玻璃中的传播速度较小 |
| D.b光在玻璃中的传播时间较短 |
【2015·全国新课标Ⅱ·34(1)】如图,一束光沿半径方向射向一块半圆形玻璃砖,在玻璃砖底面上的入射角为θ,经折射后射出a、b两束光线,则 (填正确答案标号,选对1个给2分,选对2个得4分,选对3个得5分,每选错1个扣3分,最低得分0分)
| A.在玻璃中,a光的传播速度小于b光的传播速度 |
| B.在真空中,a光的波长小于b光的波长 |
| C.玻璃砖对a光的折射率小于对b光的折射率 |
| D.若改变光束的入射方向使θ角逐渐变大,则折射光线a首先消失 |
E.分别用a、b光在同一个双缝干涉实验装置上做实验,a光的干涉条纹间距大于b光的干涉条纹间距
【2015·安徽·18】如图所示,一束单色光从空气入射到棱镜的AB面上,经AB和AC两个面折射后从AC面进入空气。当出射角 和入射角i相等时,出射光线相对于入射光线偏转的角度为
和入射角i相等时,出射光线相对于入射光线偏转的角度为 。已知棱镜顶角为α,则计算棱镜对该色光的折射率表达式为
。已知棱镜顶角为α,则计算棱镜对该色光的折射率表达式为
A. |
B. |
C. |
D. |