如图所示各元件规格如图示,则图中电容器所带电量为( )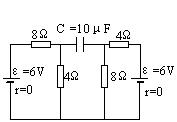
| A.6×10-5C; | B.2×10-5C; |
| C.4×10-5C; | D.1.2×10-5C; |
如图所示,直线A是电源的路端电压和电流的关系图象,直线B、C分别是电阻R1、R2的两端电压与电流的关系图象,若将这两个电阻分别接到该电源上,下列说法正确的是 ( )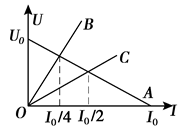
A.两电阻阻值R1>R2
B.R2接在电源上时,电源的内阻消耗功率大
C.R2接在电源上时,电源的效率高
D.电源的内阻和R2的阻值相等
如图所示,现有一带正电的粒子能够在正交的匀强电场和匀强磁场中匀速直线穿过。设产生匀强电场的两极板间电压为U,板间距离为d,匀强磁场的磁感应强度为B,粒子带电荷量为q,进入速度为v(不计粒子的重力)。以下说法正确的是 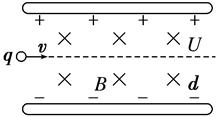
A.匀速穿过时粒子速度v与U、d、B间的关系为 |
| B.若只增大v,其他条件不变,则粒子仍能直线穿过 |
| C.若只增大U,其他条件不变,则粒子仍能直线穿过 |
| D.若保持两板间电压不变,只减小d,其他条件不变,粒子进入两板间后将向下偏 |
根据磁场对电流会产生作用力的原理,人们研制出一种新型的发射炮弹的装置——电磁炮,其原理如图所示:把待发炮弹(导体)放置在强磁场中的两平行导轨上,给导轨通以大电流,使炮弹作为一个通电导体在磁场作用下沿导轨加速运动,并以某一速度发射出去。现要提高电磁炮的发射速度,你认为下列方案在理论上可行的是( )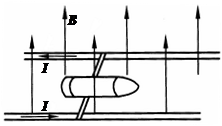
| A.增大磁感应强度B的值 |
| B.增大电流I的值 |
| C.减小磁感应强度B的值 |
| D.改变磁感应强度B的方向,使之与炮弹前进方向平行 |
如图所示,平行板电容器C与一电源E连接, P为一自动控制元件,只有自a向b的电流通过P时,P才会自动控制外电路,关于该电路的工作原理,下列叙述正确的是( )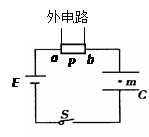
| A.当电键S闭合后,增大平行板电容器两板间距离,P会对外电路起到控制作用 |
| B.当电键S闭合后,减小平行板电容器两板间距离,P会对外电路起到控制作用 |
| C.将电键S断开,增大平行板电容器两板间距离,P会对外电路起到控制作用 |
| D.将电键S断开,减小平行板电容器两板间距离,P会对外电路起到控制作用 |
关于带电粒子在电场或磁场中运动的表述,以下正确的是
| A.带电粒子在电场中某点受到的电场力方向与该点的电场强度方向相同 |
| B.正电荷只在电场力作用下,一定从高电势处向低电势处运动 |
| C.带电粒子在磁场中运动时受到的洛伦兹力方向与粒子的速度方向垂直 |
| D.带电粒子在磁场中某点受到的洛伦兹力方向与该点的磁场方向相同 |