如图a所示,在真空中,半径为r的圆形区域内存在匀强磁场,磁场方向垂直纸面向外。在磁场右侧有一对平行正对金属板M和N,两板间距离为d,O1O2为两板的中心线。距平行金属板右端距离为l的位置放置竖直荧光屏其中心为O3,且O、O1、O2和O3在同一水平线上。有一粒子源发出电荷量为q、质量为m带正电的粒子束,以速率
 从圆心O正下方的P点沿PO方向不断地射入磁场,粒子恰好由O1处沿O1O2进入金属板,粒子在板MN间的飞行时间均为T,现在将N板接地,如图(a)所示,U0是M板的电势大小如图(b)(c)所示,不计重力影响及粒子间的相互作用。
从圆心O正下方的P点沿PO方向不断地射入磁场,粒子恰好由O1处沿O1O2进入金属板,粒子在板MN间的飞行时间均为T,现在将N板接地,如图(a)所示,U0是M板的电势大小如图(b)(c)所示,不计重力影响及粒子间的相互作用。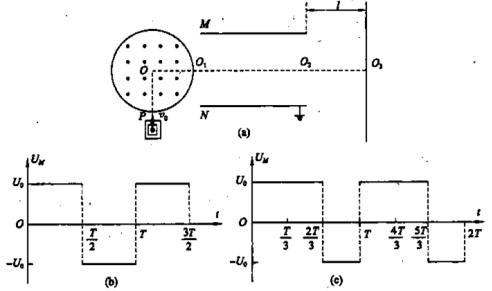
(1)求圆形区域磁场的磁感应强度B的大小;
(2)若M板上的电势如图(b)所示,t=0时M板电势为U0,求t=0时刻飞入电场的粒子最终打在荧光民间上距O3的距离;
(3)若M板上的电势如图(c)所示,粒子从O1点沿O1O2方向进入电场并射出,求它们射出电场时的速度大小及方向;
(4)若M板上的电势如图(c)所示,求荧光屏上能出现光亮区域的长度。
某恒星远处有一颗行星,靠近行星周围有众多的卫星,且相对均匀地分布于行星周围。假设卫星绕行星的运动是匀速圆周运动,通过天文观测,测得离该行星最近的一颗卫星运动的轨道半径为 ,周期为
,周期为 。已知万有引力常量为G。
。已知万有引力常量为G。
(1)求该行星的质量;
(2)通过天文观测,发现离该行星很远处还有一颗卫星,其运动的轨道半径为 ,周期为
,周期为 ,试估算该行星周围众多卫星的总质量。
,试估算该行星周围众多卫星的总质量。
(3)通过天文观测发现,某一时刻行星跟距离自己最近的卫星以及距离自己很远的卫星正好分布在一条直线上,求再经过多长时间它们又将分布在一条直线上。
如图所示,在水平地面上固定一倾角θ=37°、表面光滑的斜面,物体A以 的初速度沿斜面上滑,同时在物体A的正上方,物体B以某一初速度
的初速度沿斜面上滑,同时在物体A的正上方,物体B以某一初速度 水平抛出。如果当A上滑到最高点时恰好被B物体击中(A、B均可看作质点, sin37°=0.6,cos37°=0.8,g取10m/s2)。求:
水平抛出。如果当A上滑到最高点时恰好被B物体击中(A、B均可看作质点, sin37°=0.6,cos37°=0.8,g取10m/s2)。求:
(1)物体A上滑到最高点所用的时间t;
(2)物体B抛出时的初速度。
(3)物体A、B间初始位置的高度差h。
如图,传送带与地面倾角θ=30°,AB长度为 ,传送带以
,传送带以 的速率逆时针转动.在传送带上端A无初速度地放上一个质量为
的速率逆时针转动.在传送带上端A无初速度地放上一个质量为 的物体,它与传送带之间的动摩擦因数为
的物体,它与传送带之间的动摩擦因数为 ,取
,取 ,则:
,则:
(1)从物体开始运动至物体刚与传送带达到共同速度这一过程中,传送带的摩擦力对物体做了多少功?
(2)物体从与传送带达到共同速度的瞬间至滑到B端的过程中,传送带的摩擦力对物体又做了多少功?
如图所示,轻杆长为3L, 在杆的A、B两端分别固定质量均为 的球A和球B,杆上距球A为L处的点O装在光滑水平转动轴上,杆和球在竖直面内转动,已知球A运动到最高点时,球A对杆恰好无作用力。求:
的球A和球B,杆上距球A为L处的点O装在光滑水平转动轴上,杆和球在竖直面内转动,已知球A运动到最高点时,球A对杆恰好无作用力。求: 
(1)球A在最高点时的角速度大小;
(2)球A在最高点时,杆对水平轴的作用力的大小和方向。
如图所示,在距地面高为H=45m处,有一小球A以初速度 水平抛出,与此同时,在A的正下方有一物块B也以相同的初速度
水平抛出,与此同时,在A的正下方有一物块B也以相同的初速度 同方向滑出,B与地面间的动摩擦因数为
同方向滑出,B与地面间的动摩擦因数为 。A、B均可视为质点,空气阻力不计,重力加速度取
。A、B均可视为质点,空气阻力不计,重力加速度取 ,求:
,求: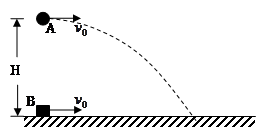
(1)A球落地时间及其抛出的水平距离。
(2)A球落地时,A、B相距多远。