下列说法正确的是( )
| A.话筒是一种常用的声传感器,其作用是将电信号转换为声信号 |
| B.电熨斗能够自动控制温度的原因是它装有双金属片温度传感器,这种传感器作用是控制电路的通断 |
| C.电子秤所使用的测力装置是力传感器 |
| D.半导体热敏电阻常用作温度传感器,因为温度越高,它的电阻值越大 |
一玻璃砖横截面如图所示,其中ABC为直角三角形(AC边未画出),AB为直角边,∠ABC=45°;ADC为一圆弧,其圆心在BC边的中点.此玻璃的折射率为1.5.P为一贴近玻璃砖放置的、与AB垂直的光屏.若一束宽度与AB边长度相等的平行光从AB边垂直射入玻璃砖,则( ).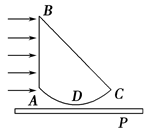
| A.从BC边折射出一束宽度与BC边长度相等的平行光 |
| B.屏上有一亮区,其宽度小于AB边的长度 |
| C.屏上有一亮区,其宽度等于AC边的长度 |
| D.当屏向远离玻璃砖的方向平行移动时,屏上亮区先逐渐变小然后逐渐变大 |
如图所示,有一束平行于等边三棱镜截面ABC的单色光从空气射向E点,并偏折到F点.已知入射方向与边AB的夹角为θ=30°,E、F分别为边AB、BC的中点,则 ( ).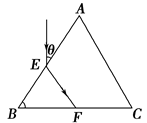
A.该棱镜的折射率为
B.光在F点发生全反射
C.光从空气进入棱镜,波长变小
D.从F点出射的光束与入射到E点的光束平行
雨后太阳光入射到水滴中发生色散而形成彩虹.设水滴是球形的,图中的圆代表水滴过球心的截面,入射光线在过此截面的平面内,a、b、c、d代表四条不同颜色的出射光线,则它们可能依次是( ).
| A.紫光、黄光、蓝光和红光 |
| B.紫光、蓝光、黄光和红光 |
| C.红光、蓝光、黄光和紫光 |
| D.红光、黄光、蓝光和紫光 |
华裔科学家高锟获得2009年诺贝尔物理奖,他被誉为“光纤通讯之父”.光纤通讯中信号传播的主要载体是光导纤维,它的结构如图所示,其内芯和外套材料不同,光在内芯中传播.下列关于光导纤维的说法中正确的是( ).
| A.内芯的折射率比外套的大,光传播时在内芯与外套的界面上发生全反射 |
| B.内芯的折射率比外套的小,光传播时在内芯与外套的界面上发生全反射 |
| C.波长越短的光在光纤中传播的速度越大 |
| D.频率越大的光在光纤中传播的速度越大 |
如图所示,一个三棱镜的截面为等腰直角△ABC,∠A为直角.此截面所在平面内的光线沿平行于BC边的方向射到AB边,进入棱镜后直接射到AC边上,并刚好能发生全反射.该棱镜材料的折射率为 ( ).
A. |
B. |
C. |
D. |