如图所示,将边长为a、质量为m、电阻为R的正方形导线框竖直向上抛出,穿过宽度为b、磁感应强度为B的匀强磁场,磁场 的方向垂直纸面向里.线框向上离开磁场时的速度刚好是进人磁场时速度的一半,线框离开磁场后继续上升一段高度,然后落下并匀速进人磁场.整个运动过程中始终存在着大
的方向垂直纸面向里.线框向上离开磁场时的速度刚好是进人磁场时速度的一半,线框离开磁场后继续上升一段高度,然后落下并匀速进人磁场.整个运动过程中始终存在着大 小恒定的空气阻力f且线框不发生转动.求:
小恒定的空气阻力f且线框不发生转动.求: 
(1)线框在下落阶段匀速进人磁场时的速度V2;
(2)线框在上升阶段刚离开磁场时的速度V1;
(3)线框在上升阶段通过磁场过程中产生的焦耳热Q.
如图所示是一种折射率 的棱镜。现有一束光线沿MN方向射到棱镜的AB面上,入射角的大小i=60°,求:
的棱镜。现有一束光线沿MN方向射到棱镜的AB面上,入射角的大小i=60°,求:
(1)光在棱镜中传播的速率;
(2)画出此束光线进入棱镜后又射出棱镜的光路图,要求写出简要的分析过程。
如图所示是一列沿x轴正方向传播的简谐横波在t=0时刻的波形图(波恰好传到x=2m的质点处),已知波的传播速度v=2m/s.
(1)请写出质点O简谐运动的表达式;
(2)求x=3. 5m的质点P(图中没有画出)第二次到达波谷所需的时间。
(10分)A、B为一平行板,板长为l,两板间距离为d,板间区域内充满着匀强磁场,磁感应强度大小为B,方向垂直纸面向里。一个质量为m,带电荷量 为+q的带电粒子以一定初速度沿A、B两板中线且垂直于磁感线方向射入磁场中,粒子恰好从A板的右边界飞出。粒子重力不计。求:
(1)粒子在磁场中运动的轨道半径r和射入磁场的初速度v0各是多少?
(2)粒子在磁场中运动的时间t是多少?
(12分)如图所示,质量为m,电荷量为e的电子,从A点以速度v0垂直于电场方向射入一个电场强度为E的匀强电场中,从B点射出电场时的速度方向与电场线成120°角,电子重力不计。求: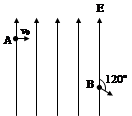
(1)电子在电场中的加速度大小a及电子在B点的速度大小vB?
(2)A、B两点间的电势差UAB?
(3)电子从A运动到B的时间tAB?
如图所示,两条互相平行的光滑金属导轨位于水平面内,距离为L=0.2米,在导轨的一端接有阻值为R=0.5欧的电阻,在
 0处有一与水平面垂直的均匀磁场,磁感强度B=0.5T,一质量为m=0.1千克的金属杆垂直放置在导轨上,并以v0=2米/秒的初速度进入磁场,在安培力和一垂直于杆的水平外力F的共同作用下做匀变速直线运动,加速度大小为a=2米/秒2、方向与初速度方向相反,设导轨和金属杆的电阻都可以忽略,且接触良好,求:
0处有一与水平面垂直的均匀磁场,磁感强度B=0.5T,一质量为m=0.1千克的金属杆垂直放置在导轨上,并以v0=2米/秒的初速度进入磁场,在安培力和一垂直于杆的水平外力F的共同作用下做匀变速直线运动,加速度大小为a=2米/秒2、方向与初速度方向相反,设导轨和金属杆的电阻都可以忽略,且接触良好,求:
(1)电流为零时金属杆所处的位置;
(2)电流为最大值的一半时施加在金属杆上外力F的大小和方向;
(3)保持其它条件不变,而初速度v0取不同值,求开始时F的方向与初速度v0取值的关系。