如图所示,L1、L2是高压输电线,图中两电表示数分别是220V和10A,已知甲图中原、副线圈匝数比为100:1,乙图中原副线圈匝数比为1:10,则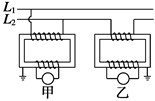
| A.甲图中的电表是电压表,输电电压为2200 V |
| B.甲图是电流互感器.输电电流是100 A |
| C.乙图中的电表是电压表,输电电压为22000 V |
| D.乙图是电流互感器,输电电流是100 A |
人用手托着质量为m的“小苹果”,从静止开始沿水平方向运动,前进距离l后,速度为v(物体与手始终相对静止),物体与手掌之间的动摩擦因数为μ,则下列说法正确的是()
| A.手对苹果的作用力方向竖直向上 |
| B.苹果所受摩擦力大小为μmg |
C.手对苹果做的功为 mv2 mv2 |
| D.苹果对手不做功 |
某大型游乐场内的新型滑梯可以等效为如图所示的物理模型,一个小朋友与斜面在AB段的动摩擦因数μ1<tan θ,BC段的动摩擦因数μ2>tan θ,他从A点开始下滑,滑到C点恰好静止,整个过程中滑梯保持静止状态。该小朋友从斜面顶端A点滑到底端C点的过程中()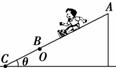
| A.地面对滑梯的摩擦力方向先水平向左,后水平向右 |
| B.地面对滑梯始终无摩擦力作用 |
| C.地面对滑梯的支持力的大小始终等于小朋友和滑梯的总重力的大小 |
| D.地面对滑梯的支持力的大小先大于、后小于小朋友和滑梯的总重力的大小 |
2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上。中科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军.改写了我国服务机器人从未进人世界前5的纪录,标志着我国在该领域的研究取得了重要进展。图中是科大著名服务机器人“可佳”,如图所示,现要执行一项任务。给它设定了如下动作程序:机器人在平面内由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1 )沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点(5,5)沿直线运动到点(2,2)。该个过程中机器人所用时间是 s,则()
s,则()
| A.机器人的运动轨迹是一条直线 |
B.整个过程中机器人的位移大小为 m m |
| C.机器人不会两次通过同一点 |
| D.整个过程中机器人的平均速度为1.5m/s |
在军事演习中,某空降兵从飞机上跳下,先做自由落体运动,在t1时刻,速度达到较大值v1时打开降落伞,做减速运动,在t2时刻以较小速度v2着地.他的速度图象如图所示.下列关于该空降兵在0~t2或t1~t2时间内的平均速度 的结论正确的是()
的结论正确的是()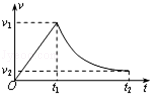
A.0~t2,= |
B.t1~t2;= |
C.t1~t2; > > |
D.t1~t2;< |
如图所示,相距为d的两水平虚线p1、p2表示方向垂直纸面向里的匀强磁场的上下边界,磁场的磁感应强度为B。正方形线框abcd的边长为L(L<d)、质量为m、电阻为R,线框处在磁场正上方,ab边与虚线p1相距h。线框由静止释放,下落过程中线框平面始终在竖直平面内,线框的ab边刚进人磁场时的速度和ab边刚离开磁场时的速度相同。在线框从进入到全部穿过磁场的过程中,下列说法正确的是( )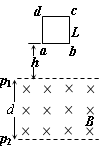
A.线框克服安培力所做的功为2mgd
B.线框克服安培力所做的功为mg(L+d)
C.线框的最小速度为
D.线框的最小速度为