如图所示,用细丝线悬挂的带有正电荷的小球,质量为m,处在水平向右的匀强电场中,在电场作用下,小球由最低点开始运动,经过b点后还可以再向右摆动。如用⊿E1表示重力势能的增量,用⊿E2表示电势能的增量,用⊿E表示二者之和(⊿E=⊿E1+⊿E2),则在小球由a摆到b这一过程中,下列关系式正确的是:
| A.⊿E1<0, ⊿E2<0, ⊿E<0 | B.⊿E1>0, ⊿E2<0, ⊿E="0" |
| C.⊿E1>0, ⊿E2<0, ⊿E<0 | D.⊿E1>0, ⊿E2<0, ⊿E>0 |
图甲所示电路中, 为相同的电流表,C为电容器,电阻
为相同的电流表,C为电容器,电阻 的阻值相同,线圈L的电阻不计。在某段时间内理想变压器原线圈内磁场的变化如图乙所示,则在
的阻值相同,线圈L的电阻不计。在某段时间内理想变压器原线圈内磁场的变化如图乙所示,则在 时间内( )
时间内( )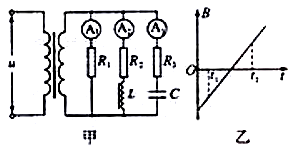
A.电流表 的示数比 的示数比 的小 的小 |
| B.电流表的示数比A3的小 |
| C.电流表和的示数相同 |
| D.电流表的示数都不为零 |
如图所示,R 1为定值电阻,R 2为负温度系数的热敏电阻(负温度系数热敏电阻是指阻值随温度的升高而减小的热敏电阻),L为小灯泡,当温度降低时( )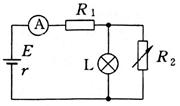
| A.R1两端的电压增大 |
| B.电流表的示数增大 |
| C.小灯泡的亮度变强 |
| D.小灯泡的亮度变弱 |
矩形线圈在匀强磁场中匀速转动,从中性面开始转动180°的过程中,平均感应电动势和最大感应电动势之比为( )
| A.π/2 | B.2/π |
| C.2π | D.π |
如图所示,图线a是线圈在匀强磁场中匀速转动时产生的正弦交流电的图像,当调整线圈转速后,所产生的正弦交流电的图像如图线b所示。以下关于这两个正弦交流电的说法中正确的是 ( )
| A.线圈先后两次转速之比为1:2 |
| B.交流电a的电压瞬时值u="10sin0.4πt" V |
| C.交流电b的最大值为20/3 V |
| D.交流电a在图中t=0.1s时刻穿过线圈的磁通量不为零 |
在电磁感应现象中,下列说法正确的是( )
| A.感应电流的磁场总是阻碍原磁通量的变化 |
| B.闭合线框放在变化的磁场中一定能产生感应电流 |
| C.闭合线框放在匀强磁场中做切割磁感线运动,一定产生感应电流 |
| D.感应电流的磁场总是跟原来的磁场方向相反 |