若函数对任意都有,的最小正值为( )
某人站在山顶向下看一列车队向山脚驶来,他看见第一辆车与第二辆车的俯角差等于他看见第二辆车与第三辆车的俯角差,则第一辆车与第二辆车的距离与第二辆车与第三辆车的距离之间的关系为()
试卷网 试题网 古诗词网 作文网 范文网
Copyright ©2020-2025 优题课 youtike.com 版权所有
粤ICP备20024846号
 对任意
对任意 都有
都有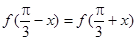 ,
, 的最小正值为( )
的最小正值为( )



 某人站在山顶向下
某人站在山顶向下 看一列车队向山脚驶来,他看见第一辆车与第二辆车的俯角差等于他看见第二辆车与第三辆车的俯角差,则第一辆车与第二辆车的距离
看一列车队向山脚驶来,他看见第一辆车与第二辆车的俯角差等于他看见第二辆车与第三辆车的俯角差,则第一辆车与第二辆车的距离 与第二辆车与第三辆车的距离
与第二辆车与第三辆车的距离 之间的关系为()
之间的关系为()





