如图所示,AC是上端带定滑轮的固定竖直杆,质量不计的轻杆BC一端通过铰链固定在C点,另一端B栓牢一根轻绳,轻绳下端悬挂一重为G的物体,上端绕过定滑轮A,用水平拉力F拉轻绳,开始时∠BCA = 160°,现使∠BCA缓慢变小,直到杆BC接近竖直杆AC.在此过程中(不计滑轮质量,不计摩擦)( ) 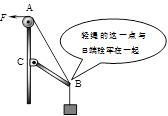
A.拉力F大小不变
B.拉力F逐渐减小[
C.轻杆B端所受轻绳的作用力大小不变
D.轻杆B端所受轻绳的作用力先减小后增大
已知一列简谐横波沿x轴方向传播,图中的实线和虚线分别为t1和t2时刻的波形图线,已知
t2-t1="4.6s," 周期T=0.8s,则此波在这段时间内传播的方向和距离分别为 ()
| A.x轴的正方向,46m |
| B.x轴的负方向,46m |
| C.x轴的正方向,2m |
| D.x轴的负方向,6m |
如图所示为同一实验室中两个单摆的振动图像。从图象可以知道它们的 ()
| A.摆长相等 |
| B.振幅相等 |
| C.摆球同时改变速度方向 |
| D.摆球质量差1 倍 |
如图所示,轻质弹簧下挂重为300N的物体A,伸长了3cm,再挂上重为200N的物体B时又伸长了2cm,弹簧均在弹性限度内若将连接A、B两物体的细绳烧断,使 A在竖直面内做简谐运动,下列说法中正确的是()
A.最大回复力为300N
B.最大回复力为200N
C.振幅为2cm
D.振幅为5cm
对于做简谐运动的单摆,下列说法中正确的是 ( )
| A.在位移为正的区间,速度和加速度都一定为负 |
| B.当位移逐渐增大时,回复力逐渐增大,振动的能量也逐渐增大 |
| C.摆球经过平衡位置时,速度最大,势能最小,摆线所受拉力最大 |
| D.摆球在最大位移处时,速度为零,处于平衡状态 |
“二分频”音箱内有高、低两个扬声器.音箱要将扩音机送来的含有不同频率的混合音频电流按高、低频段分离出来,送往相应的扬声器,以便使电流所携带的音频信息按原比例还原成高、低频的机械振动.如图所示为音箱的电路简化图,高、低频混合电流由a、b端输入,L1和L2是线圈,C1和C2是电容器,则 ( )
| A.甲扬声器是高音扬声器 |
| B.C2的作用是阻碍低频电流通过乙扬声器 |
| C.L1的作用是阻碍低频电流通过甲扬声器 |
| D.L2的作用是减弱乙扬声器的低频电流 |