2012年6月24日12时55分,航天员刘旺驾神舟再会天宫,这是中国人第一次在太空手控交会对接,“天宫一号”和“神舟九号”绕地球做匀速圆周运动的示意图如图所示,A代表“天宫一号”,B代表“神舟八号”,虚线为各自的轨道。由图,可以判定( )
| A.“天宫一号”的运行速率大于“神舟九号”的运行速率 |
| B.“天宫一号”的周期小于“神舟九号”的周期 |
| C.“天宫一号”的向心加速度大于“神舟九号”的向心加速度 |
| D.“神舟九号”适度加速有可能与“天宫一号”实现对接 |
理想变压器工作时,原线圈输入与副线圈输出的物理量一定相同的是( )
| A.电压有效值 | B.电流有效值 |
| C.交变电流频率 | D.交流电功率 |
如图11所示,两块水平放置的金属板距离为d,用导线、电键K与一个n匝的线圈连接,线圈置于方向竖直向上的变化磁场B中.两板间放一台小压力传感器,压力传感器上表面静止放置一个质量为m、电荷量为+q的小球.K断开时传感器上有示数,K闭合时传感器上恰好无示数.则线圈中的磁场B的变化情况和磁通量变化率分别是( )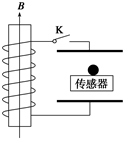
图11
A.正在增加, |
B.正在减弱, |
| C.正在减弱, |
D.正在增加, |
利用传感器和计算机可以研究快速变化的力的大小.实验时,把图10甲中的小球举高到绳子的悬点O处,然后让小球自由下落.用这种方法获得的弹性绳的拉力随时间的变化图线如图乙所示.根据图线所提供的信息,以下判断正确的是( )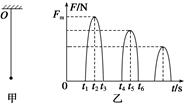
图10
| A.t2时刻小球所处位置是运动中最高点 |
| B.t1~t2期间小球速度先增大后减小 |
| C.t3时刻小球动能最小 |
| D.t2与t5时刻小球速度大小不同 |
如图9所示为一种自动跳闸的闸刀开关,O是转动轴,A是绝缘手柄,C是闸刀卡口,M、N接电源线,闸刀处于垂直纸面向里、B=1 T的匀强磁场中,CO间距离为10 cm,当磁场力为0.2 N时,闸刀开关会自动跳开.则要使闸刀开关能跳开,CO中通过的电流的大小和方向为( )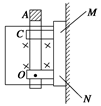
图9
| A.电流方向C→O |
| B.电流方向O→C |
| C.电流大小为2A |
| D.电流大小为0.5 A |
惯性制导系统已广泛应用于弹道式导弹工程中,这个系统的重要元件之一是加速度计.加速度计构造和原理的示意图如图8所示:沿导弹长度方向安装的固定光滑杆上套一质量为m的滑块,滑块两侧分别与劲度系数均为k的弹簧相连;两弹簧的另一端与固定壁相连.滑块原来静止,弹簧处于自然长度,滑块上有指针,可通过标尺测出滑块的位移,然后通过控制系统进行制导.设某段时间内导弹沿水平方向运动,指针向左偏离O点的距离为x,则这段时间内导弹的加速度( )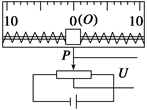
图8
| A.方向向左,大小为kx/m |
| B.方向向右,大小为kx/m |
| C.方向向左,大小为2kx/m |
| D.方向向右,大小为2kx/m |