图1是某同学设计的电容式速度传感器原理图,其中上板为固定极板,下板为待测物体.在两极板间电压恒定的条件下,极板上带电量Q将随待测物体的上下运动而变化.若Q随时间t的变化关系为Q (a、b为大于零的常数),其图象如图2所示,那么图3、图4中反映极板间场强大小E和物体速率v随t变化的图线可能是( )
(a、b为大于零的常数),其图象如图2所示,那么图3、图4中反映极板间场强大小E和物体速率v随t变化的图线可能是( )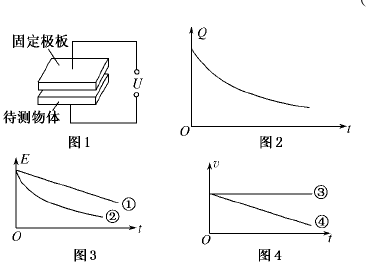
| A.①和③ | B.①和④ |
| C.②和③ | D.②和④ |
用起重机将货物匀速吊起一段距离,那么作用在货物上的各力做功情况是( )
| A.重力做正功,拉力做负功,合力做功为零 |
| B.重力做负功,拉力做正功,合力做正功 |
| C.重力做负功,拉力做正功,合力做功为零 |
| D.重力不做功,拉力做正功,合力做正功 |
内壁光滑的环形凹槽半径为R,固定在竖直平面内,一根长度为 R的轻杆,一端固定有质量为m的小球甲,另一端固定有质量为2m的小球乙,将两小球放入凹槽内,小球乙位于凹槽的最低点,如图所示.由静止释放后()
R的轻杆,一端固定有质量为m的小球甲,另一端固定有质量为2m的小球乙,将两小球放入凹槽内,小球乙位于凹槽的最低点,如图所示.由静止释放后()
| A.下滑过程中甲球减少的机械能总等于乙球增加的机械能 |
| B.下滑过程中甲球减少的重力势能总等于乙球增加的重力势能 |
| C.甲球不可能沿凹槽下滑到槽的最低点 |
| D.杆从右向左滑回时,乙球一定能回到凹槽的最低点 |
某电场的电场线分布如图所示,以下说法正确的是()
A. 点场强大于 点场强大于 点场强 点场强 |
B. 点电势高于 点电势高于 点电势 点电势 |
C.若将一试探电荷+ 由点释放,它将沿电场线运动到b点 由点释放,它将沿电场线运动到b点 |
D.若在 点再固定一点电荷-Q,将一试探电荷+q由移至b的过程中,电势能减小 点再固定一点电荷-Q,将一试探电荷+q由移至b的过程中,电势能减小 |
平行板电容器的两极板A、B接于电源两极,一带正电小球悬挂在电容器内部,闭合开关S,给电容器充电,小球静止时悬线偏离竖直方向的夹角为θ,如图所示.下列说法中正确的是()
A.保持S闭合,当带正电A板向B板靠近时,θ不变
B.保持S闭合,当带正电A板向B板靠近时,θ增大
C.断开S,当带正电A板向B板靠近时,θ不变
D.断开S,当带正电A板向B板靠近时,θ增大
据中新社3月10日消息,我国将于2011年上半年发射“天宫一号”目标飞行器,2011年下半年发射“神舟八号”飞船,并与“天宫一号”实现对接。某同学得知上述消息后,画出“天宫一号”和“神舟八号”绕地球做匀速圆周运动的假想图如图所示,A代表“天宫一号”,B代表“神舟八号”,虚线为各自的轨道.由此假想图,可以判定() 
| A.“天宫一号”和“神舟八号”的运行速率都小于7.9km/s |
| B.“天宫一号”的势能小于“神舟八号”的势能 |
| C.“天宫一号”的向心加速度大于“神舟八号”的向心加速度 |
| D.“神舟八号”加速后可以与“天宫一号”实现对接 |