在利用重锤下落验证机械能守恒定律的实验中
(1)产生误差的主要原因是_____________
A.重物下落的实际距离大于测量值
B.重物下落的实际距离小于测量值
C.重物的实际末速度v大于gt
D.重物的实际末速度v小于gt
(2)甲、乙、丙三位同学分别得到A.B、C三条点迹清晰的纸带,它们的前两个点间的距离分别是1.0mm、1.9mm、4.0mm。那么一定存在操作误差的同学是________________
错误的原因是______________________________________________________________________
(3)有一条纸带,各点距A点的距离分别为d1,d2,d3,……,如图所示,各相邻点间的时间间隔为T,当地重力加速度为g。要用它来验证B和G两点处机械能是否相同,可量得BG间的距离h=________,B点的速度表达式为vB___________,G点的速度表达式为vG_____________。
(4)若B点和G点的速度vB、vG和B、G间的距离h均为已知量,则当______ _=____________时,
机械能守恒。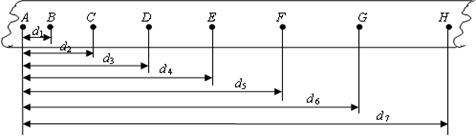
某同学在做“研究匀变速直线运动”的实验:
(1)实验室提供了下列的实验器材:
①电火花打点计时器②天平③铁架台④细绳和纸带
⑤钩码和小车⑥秒表⑦一端有滑轮的长木板⑧刻度尺
其中不需要的器材有:。
(2)把实验过程中缺少的步骤填入空格
1.把一端附有滑轮的长木板平放在实验桌上,并使滑轮伸出桌面,把电火花打点计时器固定在长木板上远离滑轮的一端,连接好电路.
2.纸带穿过限位孔,连接在小车后,用一条细绳拴在小车上,使细绳跨过滑轮,下边挂上合适的钩码,,,让小车拖着纸带运动,打完一条后立即关闭电源.
3.换上新纸带,重复操作三次.
(3)该同学选择了一条清晰的纸带,在纸带上确定出A、B、C、D、E、F、G共7个计数点.其相邻点间的距离如图所示,每两个相邻的计数点之间的时间间隔为0.10s.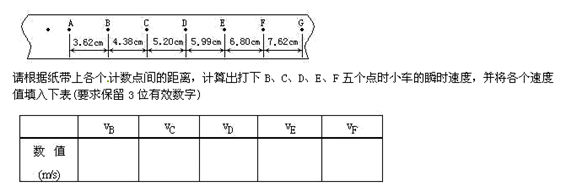
(4)将B、C、D、E、F各个时刻的瞬时速度标在如图所示的坐标纸上,并画出小车的瞬时速度随时间变化的关系图线.
(5)根据第(2)问中画出的v-t图线,求出小车运动的加速度为m/s2(保留两位有效数字)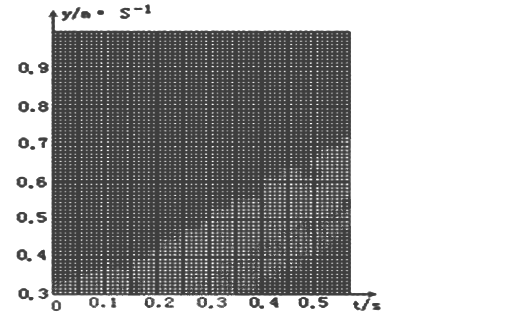
某学生用打点计时器研究小车的匀变速直线运动。他将打点计时器接到频率为50 Hz的交流电源上,实验时得到一条纸带。他在纸带上便于测量的地方选取第一个计时点,在这点下标明A,第六个点下标明B,第十一个点下标明C,第十六个点下标明D,第二十一个点下标明E。测量时发现B点已模糊不清,于是他测得AC长为14.56 cm,CD长为11.15 cm,DE长为13.73 cm,则打C点时小车的瞬时速度大小为m/s,小车运动的加速度大小为 m/s2,AB的距离应为cm。(保留三位有效数字) 
利用如入所示电路,测定电源电动势和小电阻r,已知R1=R2=R3=1Ω,电源内阻不计,当电键K断开时,电压表读数为0.8V;当电键K闭合时,电压表的读数为1V,该电源的电动势和小电阻分别为V和Ω。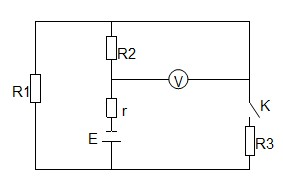
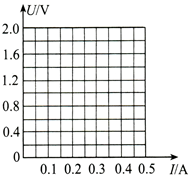
为研究小灯泡的伏安曲线的特性,选用小灯的泡额定值为“2.0V,0.5A”,实验中有仪器:小灯泡、电流表(内阻约为1Ω)、电压表(内阻约为2KΩ)、开关、导线若干。
(1)完成该实验除以上仪器还需要的仪器有_______________和_______________。
(2)为使小灯泡上的电压从零开始,能在较大的范围调节,请在方框内画出电路图。
(3)根据表格中的实验数据在图中画出小灯泡的U-I曲线。
 |
如图所示,为某一电流表G的刻度盘,使用时指针指着某一电流刻度,表示通过电流表的电流为某一数值,而且也意味着表头的两接线柱之间具有一定大小的电压,因此,电流表G实际上也是一个小量程的电压表。如果图中电流表的内阻是100Ω,请在这个刻度盘上对应1、2、3的下面标出相应的电压数值(单位为V)。