如图所示,A、B是带有等量的同种电荷的两小球,它们的质量都是m,它们的悬线长度是L,悬线上端都固定在同一点O,B球悬线竖直且被固定,A球在力的作用下,在偏离B球x的地方静止平衡,此时A受到绳的拉力为FT;现保持其他条件不变,用改变A球质量的方法,使A球在距离B为 处静止平衡,则A受到绳的拉力为( )
处静止平衡,则A受到绳的拉力为( )
| A.FT | B.2FT | C.4FT | D.8FT |
用轻弹簧竖直悬挂的质量为m物体,静止时弹簧伸长量为L0现用该弹簧沿斜面方向拉住质量为2m的物体,系统静止时弹簧伸长量也为L0斜面倾角为30 ,如图所示。则物体所受摩擦力
,如图所示。则物体所受摩擦力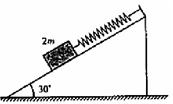
| A.等于零 |
B.大小为 ,方向沿斜面向下 ,方向沿斜面向下 |
C.大于为 ,方向沿斜面向上 ,方向沿斜面向上 |
| D.大小为mg,方向沿斜面向上 |
如图所示,水平虚线上有两个等量异种点电荷A、B, M、N、O是AB的垂线上两点,且AO>OB,2ON=OM。一个带正电的试探电荷在空间中运动的轨迹如图中实线所示,设M、N两点的场强大小分别EM、EN,电势分别为φM、φN,则下列判断正确的是
| A.A点电荷一定带正电 |
| B.试探电荷在M处的电势能小于N处的电势能 |
| C.EM一定小于EN,φM可能大于φN |
| D.UMN=UNO |
在固定的等量异种电荷连线上,a点是连线的中点,如图7-5所示,静止a点的点电荷在电场力作用下向b点运动。在运动过程中,以下判定正确的是( )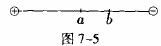
| A.点电荷的速度越来越大 |
| B.点电荷的加速度不变 |
| C.点电荷的电势能越来越大 |
| D.点电荷通过的各点电势越来越高 |
如图所示.一个轻质弹簧下端挂一小铁片,当开关S断开时,铁片刚好与水银槽中水银接触.当开关S闭合后,铁片会( )
A 不动 B.陷入水银面以下 C.向上运动停在空中 D 上下不停地振动
为了判断一段导线是否有直流电通过。手边若有下列几组器材,其中最理想的一组是()
| A.被磁化的缝衣针和细棉线 |
| B.蹄型磁铁和细棉线 |
| C.小灯泡和导线 |
| D.带电的泡沫塑料球和细棉线 |