某同学用传感器来探究摩擦力,他的实验步骤如下:
①将力传感器连接到计算机上;②将一质量m="3.75" kg的木块置于水平桌面上,用细绳将木块和传感器连接起来;③沿水平方向拉传感器,木块由静止开始运动,一段时间后停止拉动;④将实验得到的数据经计算机处理后在屏幕上显示出如图所示的图象。(g取10m/s2)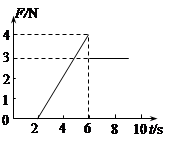
下列有关这个实验的几个说法,其中正确的是
| A.木块与桌面间的最大静摩擦力为3N |
| B.木块受到的最大静摩擦力比滑动摩擦力大 |
| C.0~6 s内木块一直受到静摩擦力的作用 |
| D.木块与桌面间的动摩擦因数为0.08 |
某同学身高1.80m,在运动会上他参加跳高比赛,起跳后身体横着越过1.70m高度的横杆,由此可以估算出他起跳时,竖直向上的速度大约是(g=10m/s2)()
| A. 2m/s | B.4m/s | C.6m/s | D.8m/s |
一质点做匀加速直线运动,第三秒内的位移2m,第四秒内的位移是2.5m,那么以下说法正确的是()
| A.这两秒内平均速度是2.25m/s |
| B.第三秒末瞬时速度是2.5m/s |
| C.质点的加速度是0.125m/s2 |
| D.质点的加速度是0.25m/s2 |
如图,用水平恒力F推放置在水平面上的物体m,物体保持静止,关于物体受力情况说法正确的是()
| A.推力小于物体所受摩擦力 |
| B.物体所受摩擦力的方向与推力的方向相反 |
| C.物体所受摩擦力的大小可由f=μFN直接计算 |
| D.物体受到三个力的作用 |
关于弹力,下列说法中不正确的是()
| A.通常所说的拉力是弹力 |
| B.物体产生的弹力的方向与它的弹性形变的方向相反 |
| C.两物体相互接触时就有弹力存在 |
| D.压力的方向总是垂直于接触面 |
下列关于重力的说法,正确的是( )
| A.向上抛出的篮球,在上升过程中没有受到重力的作用 |
| B.汽车在坡路上下行,受到的重力是垂直于坡面的 |
| C.物体的重心一定在物体上 |
| D.地面附近的物体在没有受到支持的时候,要向地面降落,这是由于物体受到重力作用的缘故 |