如图所示,间距l=0.4m的光滑平行金属导轨与水平面夹角 =30°,正方形区域abcd内匀强磁场的磁感应强度B=0.2T,方向垂直于斜面.甲乙两金属杆电阻R相同、质量均为m=0.02kg,垂直于导轨放置.起初,甲金属杆处在磁场的上边界ab上,乙在甲上方距甲也为l处.现将两金属杆同时由静止释放,并同时在甲金属杆上施加一个沿着导轨的拉力F,使甲金属杆始终以a=5m/s2的加速度沿导轨匀加速运动,已知乙金属杆刚进入磁场时做匀速运动,取g=10m/s2,则( )
=30°,正方形区域abcd内匀强磁场的磁感应强度B=0.2T,方向垂直于斜面.甲乙两金属杆电阻R相同、质量均为m=0.02kg,垂直于导轨放置.起初,甲金属杆处在磁场的上边界ab上,乙在甲上方距甲也为l处.现将两金属杆同时由静止释放,并同时在甲金属杆上施加一个沿着导轨的拉力F,使甲金属杆始终以a=5m/s2的加速度沿导轨匀加速运动,已知乙金属杆刚进入磁场时做匀速运动,取g=10m/s2,则( )

A.每根金属杆的电阻 R=0.016 |
| B.甲金属杆在磁场中运动的时间是0.4s |
| C.甲金属杆在磁场中运动过程中F的功率逐渐增大 |
| D.乙金属杆在磁场中运动过程中安培力的功率是0.1W |
P、Q两电荷的电场线分布如图所示,a、b、c、d为电场中的四点.一个离子从a运动到b(不计重力),轨迹如图所示.则下列判断正确的是 ( )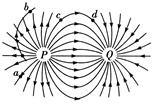
| A.离子从a到b,电势能增加 |
| B.离子在运动过程中受到P的排斥力 |
| C.c、d两点电势相等 |
| D.离子从a到b,动能增加 |
许多科学家对物理学的发展作出了巨大贡献,下列表述错误的是()
| A.库仑通过扭秤实验总结出电荷间相互作用的规律 |
| B.法拉第首先总结出磁场对电流作用力的规律 |
| C.奥斯特发现了电流周围存在着磁场 |
| D.密立根测出了元电荷e的数值 |
某同学为了验证断电自感现象,自己找来带铁心的线圈L、小灯泡A 、开关S和电池组E,用导线将它们连接成如图所示的电路.检查电路后,闭合开关S,小灯泡发光;再断开开关S,小灯泡仅有不显著的延时熄灭现象.虽经多次重复,仍未见老师演示时出现的小灯泡闪亮现象,他冥思苦想找不出原因.你认为最有可能造成小灯泡未闪亮的原因是:.
A.电源的内阻较大 B.小灯泡电阻偏大
C.线圈电阻偏大 D.线圈的自感系数较大
如图,足够长的U型光滑金属导轨平面与水平面成 角(0<<90°),其中MN和PQ平行且间距为
角(0<<90°),其中MN和PQ平行且间距为 ,导轨平面与磁感应强度为B的匀强磁场垂直,导轨电阻不计。金属棒
,导轨平面与磁感应强度为B的匀强磁场垂直,导轨电阻不计。金属棒 棒接入电路的电阻为
棒接入电路的电阻为 ,并与两导轨始终保持垂直且良好接触,使棒由静止开始沿导轨下滑,当流过棒某一横截面的电量为
,并与两导轨始终保持垂直且良好接触,使棒由静止开始沿导轨下滑,当流过棒某一横截面的电量为 时,它的速度大小为
时,它的速度大小为 ,则金属棒在这一过程中:()
,则金属棒在这一过程中:()
A.棒运动的平均速度大小为 |
B.滑行距离为 |
C.产生的焦耳热为 |
D.受到的最大安培力大小为 |
如图所示,有一闭合的等腰直角三角形导线ABC.若让它沿BA的方向匀速通过有明显边界的匀强磁场(场区宽度大于直角边长),以逆时针方向为正,从图示位置开始计时,在整个过程中,线框内的感应电流随时间变化的图象是图中的:()