一个质量为m的物体静止放在光滑水平面上,在互成60°角的大小相等的两个水平恒力作用下,经过一段时间,物体获得的速度为v,在力的方向上获得的速度分别为v1、v2,那么在这段时间内,其中一个力做的功为( )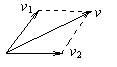
A. |
B. |
C. |
D. |
如图所示为四个物体在一条直线上运动的 图象,那么由图象可以看出,做匀加速直线运动的是
图象,那么由图象可以看出,做匀加速直线运动的是
关于质点,下列说法中不正确的是
| A.物体能否看作质点,不能由体积的大小判断 |
| B.物体能否看作质点,不能由质量的大小判断 |
| C.物体能否看作质点,不能由物体是否做直线运动判断 |
| D.研究飞行中直升机螺旋桨的转动,螺旋桨可看作质点 |
攀岩运动是一种考验人的意志与心理素质的运动形式,户外攀岩运动更加刺激与惊险。如图所示为一户外攀岩运动的场景与运动线路图,该攀岩爱好者从起点A到B,最终到达C,据此图判断下列说法中正确的是
| A.图中的线路ABC表示的是攀岩爱好者所走的位移 |
| B.线路总长度与攀岩爱好者所走时间的比等于登山者的平均速度 |
| C.由起点到终点攀岩爱好者所走线路的总长度等于位移 |
| D.攀岩爱好者所走路程要比自起点到终点的位移大 |
在xOy平面上以O为圆心、半径为r的圆形区域内,存在磁感应强度为B的匀强磁场,磁场方向垂直于xOy平面.一个质量为m、电荷量为q的带电粒子,从原点O以初速度v沿y轴正方向开始运动,经时间t后经过x轴上的P点,此时速度与x轴正方向成θ角,如图所示.不计重力的影响,则下列关系一定成立的是().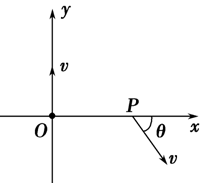
A.若r< ,则0°<θ<90° ,则0°<θ<90° |
B.若r≥,则t≥ |
| C.若t=,则r= |
D.若r=,则t= |
如图所示,MN是磁感应强度为B的匀强磁场的边界.一质量为m、电荷量为q的粒子在纸面内从O点射入磁场.若粒子速度为v0,最远能落在边界上的A点.下列说法正确的有()
| A.若粒子落在A点的左侧,其速度一定小于v0 |
| B.若粒子落在A点的右侧,其速度一定大于v0 |
C.若粒子落在A点左右两侧d的范围内,其速度不可能小于v0- |
| D.若粒子落在A点左右两侧d的范围内,其速度不可能大于v0+ |