如图所示,电源是两节普通1号干电池串联组成,电池组内阻约为0.2Ω,D是额定电压为2.5V、额定电流为0.3A的手电筒用的小灯泡,L是电阻约为1Ω左右自感线系数很大的线圈,闭合开关S,看到的现象是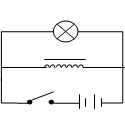
| A.灯D过一会儿逐渐变亮 |
| B.灯D立即发光,且亮度不变 |
| C.灯D开始正常发光,然后变得较暗 |
| D.灯D开始发很强的光,然后变为正常发光 |
如图所示,一个楔形物体M放在固定的粗糙斜面上,M上表面水平且光滑,下表面粗糙,在其上表面上放一光滑小球m,楔形物体由静止释放,则小球在碰到斜面前的运动轨迹是 ( )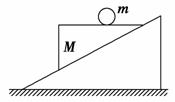
| A.沿斜面方向的直线 | B.竖直向下的直线 |
| C.无规则的曲线 | D.抛物线 |
如图所示,用一根长为l的细绳一端固定在O点,另一端悬挂质量为m的小球A,为使细绳与竖直方向夹30°角且绷紧,小球A处于静止,对小球施加的最小的力是( )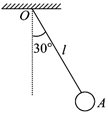
A. mg mg |
B. mg mg |
C. mg mg |
D. mg mg |
如图所示,某物体受到大小分别为F1、F2、F3的三个共点力作用,表示这三个力的矢量恰好围成一个封闭三角形,下列四个图中能使该物体所受合力为零的是()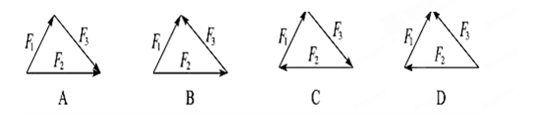
质点做直线运动的位移x与时间t的关系为x=5t+t2(各物理量均采用国际单位制单位),则该质点( )
| A.任意1 s内的速度增量都是2 m/s |
| B.前2 s内的平均速度是6 m/s |
| C.任意相邻的1 s内位移差都是1 m |
| D.第1 s内的位移是5 m |
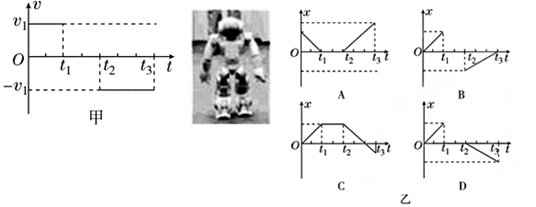
2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上。中国科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军。改写了我国服务机器人从未进人世界前5的纪录.标志着我国在该领域的研究取得了重要进展。图中是科大著名服务机器人“可佳”,如图所示。现要执行一项任务,给它设定了运动程序。图甲所示为“可佳”做直线运动的v-t图像.若将“可佳”的运动过程用x-t图像表示出来(其中x为物体相对出发点的位移),则图乙中的四幅图描述正确的是()