如图,A、B为两个完全相同的灯泡,L为自感线圈(自感系数较大;直流电阻不计),E为电源,S为开关.下列说法正确的是( ) 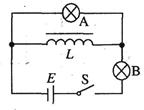
A.闭合开关稳定后,A、B一样亮
B.闭合开关的瞬间,A、B同时亮,但A很快又熄灭
C.闭合开关稳定后,断开开关,A闪亮后又熄灭
D.闭合开关稳定后,断开开关, A、B立即同时熄灭
在光滑的水平地面上方,有两个磁感应强度大小均为B,方向相反的水平匀强磁场,如图所示,PQ为两个磁场的边界,磁场范围足够大。一个半径为a,质量为m,电阻为R的金属圆环垂直磁场方向,以速度v从如图位置向右运动,当圆环运动到直径刚好与边界线PQ重合时,圆环的速度为v/2,则下列说法正确的是( )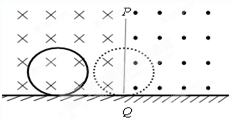
A.此时圆环中的电功率为 |
B.此时圆环的加速度为 |
C.此过程中通过圆环截面的电量为 |
D.此过程中回路产生的电能为 |
如图在边长为a的等边三角形区域内有匀强磁场B,其方向垂直纸面向外,一个边长也为a的等边三角形导线框架EFG正好与上述磁场区域的边界重合,现使导线框以周期T绕其中心O点在纸面内匀速转动,经过
 导线框转到图中虚线位置,则在这时间内()
导线框转到图中虚线位置,则在这时间内()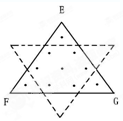
A.平均感应电动势大小等于 |
B.平均感应电动势大小等于 |
C.顺时针方向转动时感应电流方向为  |
D.逆时针方向转动时感应电流方向为  |
如图空间存在水平向左的匀强电场和垂直纸面向里的匀强磁场,电场和磁场相互垂直。在电磁场区域中,有一个竖直放置的光滑绝缘圆环,环上套有一个带正电的小球。O点为圆环的圆心,abc为圆环上的三个点,a点为最高点c点为最低点,Ob沿水平方向。已知小球所受电场力与重力大小相等。现将小球从环的顶端a点由静止释放。下列判断正确的是()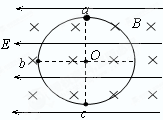
| A.当小球运动的弧长为圆周长的1/4时,洛仑兹力最大 |
| B.当小球运动的弧长为圆周长的1/2时,洛仑兹力最大 |
| C.小球从a点到b点,重力势能减小,电势能增大 |
| D.小球从b点运动到c点,电势能增大,动能先增大后减小 |
如图所示,一宽为40cm的匀强磁场区域,磁场方向垂直纸面向里,一边长为 20cm的正方形导线框位于纸面内,以垂直于磁场边界的恒定速度v=20cm/s通过磁场区域,在运动过程中,线框有一边始终与磁场区域的边界平行,取它刚进入磁场时刻t=0时,则图中能正确反映感应电流随时间变化规律的是( )
在交流电路中,交流电源电动势的有效值不变,频率可以改变,在图示电路的电键闭合时,使交流电源的频率减小,可以观察到下列论述的哪种情况()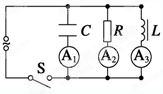
| A.A1、A2、A3的读数均不变 |
| B.A1的读数不变,A2的读数增大,A3的读数减小 |
| C.A1的读数增大,A2的读数不变,A3的读数减小 |
| D.A1的读数减小,A2的读数不变,A3的读数增大 |