(1)某同学用单摆测定加速度的实验中,图A的0点是摆线的悬挂点,摆长L= cm. 秒表读数________s为了提高测量精度,需多次改变L的值并测得相应的T值.现测得的六组数据标示在以L为横坐标、T2为纵坐标的坐标纸上,即图中用“ ”表示的点。根据图中的数据点作出T2与L的关系图线,从作出的图线可求得重力加速度g= ____m/s2(求得g值保留两位有效数字)。
”表示的点。根据图中的数据点作出T2与L的关系图线,从作出的图线可求得重力加速度g= ____m/s2(求得g值保留两位有效数字)。

(2)如果他测得的g值偏小,可能的原因是
| A.测摆线长时摆线拉得过紧 |
| B.摆线上端未牢固地系于悬点,振动中出现松动,使摆线长度增加了 |
| C.开始计时,秒表过迟按下 |
| D.实验中误将49次全振动数为50次 |

在“研究单摆周期和摆长的关系”实验中:
实验时,如甲图所示,让摆球在垂直纸面的平面内摆动,为了将人工记录振动次数改为自动记录振动次数,在摆球运动最低点的左、右两侧分别放置一激光光源与光敏电阻与某一自动记录仪相连,该仪器显示的光敏电阻阻值R随时间t变化图线如图乙所示,则该单摆的振动周期为。若保持悬点到小球顶点的绳长不变,改用直径是原小球直径2倍的另一小球进行实验,则该单摆的周期将(填“变大”、“不变”或“变小”),图乙中的△t将(填“变大”、“不变”或“变小”)。
如图甲所示是某同学探究小车加速度与力的关系的实验装置,他将光电门固定在水平轨道上的B点,用不同重物通过细线拉同一小车,每次小车都从同一位置A由静止释放.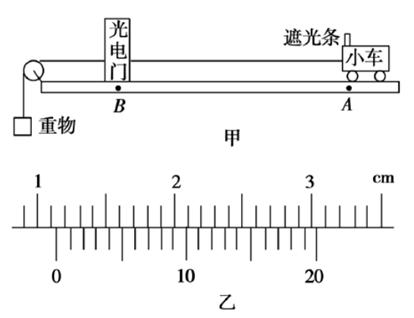
①若用游标卡尺测出遮光条的宽度d如图乙所示,则d=cm;实验时将小车从图示位置由静止释放,由数字计时器读出遮光条通过光电门的时间Δt=2.0×10-2s,则小车经过光电门时的速度为m/s;
②实验中可近似认为细线对小车的拉力与重物重力大小相等,则重物的质量m与小车的质量M间应满足的关系为;
③测出多组重物的质量m和对应遮光条通过光电门的时间Δt,并算出相应小车经过光电门时的速度v,通过描点作出线性图象,研究小车加速度与力的关系.处理数据时应作出(选填“v-m”或“v2-m”)图象。
如图a是研究小球在斜面上平抛运动的实验装置,每次将小球从弧型轨道同一位置静止释放,并逐渐改变斜面与水平地面之间的夹角θ,获得不同的射程x,最后作出了如图b所示的x-tanθ图象,g=10m/s2。则: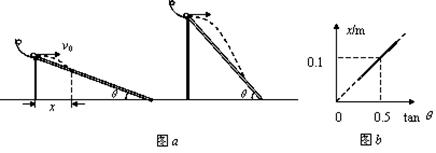
由图b可知,小球在斜面顶端水平抛出时的初速度v0=m/s。实验中发现θ超过60°后,小球将不会掉落在斜面上,则斜面的长度为m。
在“描绘小灯泡的伏安特性曲线”的实验中,小灯泡的规格为“3.8V,0.3A”。除了开关、导线外,还有如下器材:
电压表V,量程0~5 V,内阻约5 kΩ
电流表A1,量程0~500mA,内阻约0.5Ω
电流表A2,量程0~100 mA,内阻约4 Ω
滑动变阻器R1,最大阻值10 Ω,额定电流2.0 A
滑动变阻器R2,最大阻值100Ω,额定电流1.0 A
直流电源E,电动势约为6 V,内阻约为0.5 Ω
(1)上述器材中,电流表应选______,滑动变阻器应选______。(填器材符号)
(2)某同学已连接如图甲所示的电路,在闭合开关前,检查发现有一处不当之处,请指出:___________。
(3)不当之处改正后,在电路中所有元器件都完好,且电压表和电流表已调零。闭合开关后,发现反复调节滑动变阻器,小灯泡亮度发生变化,但电压表、电流表的示数不能调为零,则断路的导线为____________(用图中给出的导线符号表示)。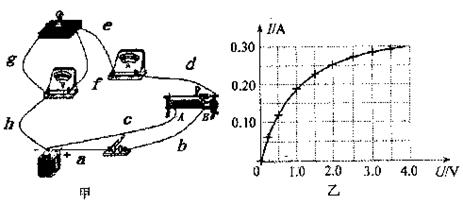
我校机器人协会的同学利用如图所示的装置探究作用力与反作用力的关系。如图甲所示,在铁架台上用弹簧测力计挂住一个实心铁球,在圆盘测力计的托板上放一烧杯水,读出两测力计的示数分别为F1、F2;再把小球浸没在水中(水不会溢出),如图乙所示,读出两测力计的示数分别为F3、F4。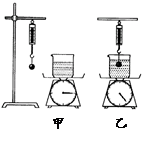
(1)请你分析弹簧测力计示数的变化,即F3_______F1(选填“>”“=”“<”)。
(2)水对铁球的浮力大小为_________,若___________,就说明了作用力与反作用力大小相等。