小明利用铁架台、带有最小刻度为1cm的杠杆、细线、若干钩码等实验装置探究杠杆的平衡条件.
(1)在挂钩码前,小明发现杠杆左端高,右端低(如图甲),他应将杠杆两端的平衡螺母向 调节(选填“左”或“右”),使杠杆在水平位置平衡.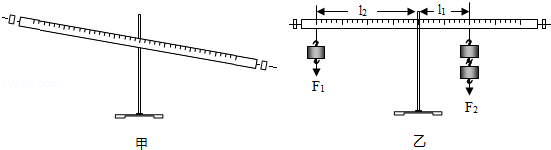
(2)接着小明在杠杆的两端挂上不同数量的钩码,移动钩码的位置,保持杠杆在水平位置平衡.则杠杆两侧受到的作用力大小 (选填“大于”、“等于”或“小于”)各自钩码所受重力大小.设右侧钩码对杠杆施的力为动力F1,则动力臂l1大小(如图乙)为 cm.
(3)改变钩码数量与位置,获取多组测量数据,填入记录表中,根据表中的数据得出杠杆的平衡条件是:F1l1=F2l2,据此,实验测量数据记录表中第三次实验中的空格应填 .
实验测量数据记录表:
| 实验次序 |
动力F1/N |
动力臂l1/cm |
阻力F2/N |
阻力臂l2/cm |
| 1 |
2.0 |
5.0 |
1.0 |
10.0 |
| 2 |
2.0 |
10.0 |
2.0 |
10.0 |
| 3 |
2.0 |
15.0 |
3.0 |
|
| … |
… |
… |
… |
… |
(4)测量多组数据的目的是 (选填“减小实验误差”或“避免实验错误”).
小海利用如图甲所示的电路探究“电压一定时,通过导体的电流跟电阻的关系”,已知电源电压为6V恒定,实验用到的电阻分别为5Ω、10Ω、15Ω、20Ω、25Ω.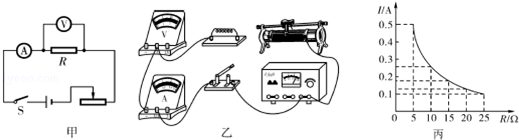
(1)根据电路图甲,将乙图中实物电路连接完整(导线不允许交叉).
(2)实验中多次改变R的阻值,调节变阻器的滑片,使电压表示数保待不变,记下电流表的示数,得到如图丙所示的电流I随电阻R变化的图象.某次实验中,小海用5Ω的电阻做好实验后,接下来:断开开关,将滑动变阻器的滑片P移到 端(选填“A”或“B”),然后将10Ω的电阻接入电路,闭合开关,移动滑片P,保持电压表的示数为 V,读出电流表的示数.
(3)为了能够完成整个实验,滑动变阻器的最大阻位应不小于 Ω.
为了研究温度对导体电阻的影响,小翔设计了如图所示的实验电路:用酒精灯对电路中的一段灯丝(阻值约30Ω)加热,观察导体电阻的变化.该实验方案存在缺陷是 ,改进方案: .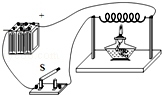
李明等几位同学准备探究“弹簧弹性势能的大小与什么因素有关”.同学们猜想:弹簧弹性势能可能与弹簧长度变化量和弹簧粗细有关.他们设计的实验装置如图,弹簧左端固定在墙上,放在水平面上,水平面A点左侧光滑,右侧粗糙.物体P压缩弹簧到B点后从静止释放,运动到C点弹簧恢复到原长与物体脱离,物体运动到D点停止.请补充完成他们的探究过程:
(1)对同一根弹簧,物体P压缩弹簧至B点,从静止释放,运动到D点.测量 之间的距离和 之间的距离,并改变 之间的距离,测多组数据,分析数据得到:弹簧长度变化量越大,弹性势能越大.
(2)对原长相同、只有粗细不同的两根弹簧,物体P分别压缩弹簧至同一位置B点,从静止释放,运动到D点.分别测量 之间的距离,改变压缩量,重复试验,分析数据得到:弹性势能与弹簧粗细有关.
如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个.
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉.此时,应把杠杆两端的平衡螺母向 (选填“左”或“右”)调节.
(2)如图甲所示,在杠杆左边A处挂四个相同钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样钩码 个.
(3)如图乙所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (选填“变大”、“变小”或“不变”),其原因是 .
(4)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图丙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于水平平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是: .
如图是小明同学斜面机械效率跟什么因素有关的实验装置.
实验时他用弹簧测力计拉着同一物块沿粗糙程度相同的斜面向上做匀速直线运动.实验的部分数据如下:
| 实验次数 |
斜面的倾斜程度 |
物块重量G/N |
斜面高度h/m |
沿斜面拉力F/N |
斜面长S/m |
机械效率 |
| 1 |
较缓 |
10 |
0.1 |
5.0 |
1 |
|
| 2 |
较陡 |
10 |
0.3 |
6.7 |
1 |
45% |
| 3 |
最陡 |
10 |
0.5 |
8.4 |
1 |
60% |
(1)小明探究的是斜面的机械效率跟 的关系.在第1次实验中,斜面的机械效率为 ,物块和斜面的内能增加了约 J.
(2)分析表格中数据可以得出结论:在斜面粗糙程度相同时,斜面越陡,机械效率越 .若要探究斜面机械效率跟斜面的粗糙程度的关系,应保持 不变.