2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上。中科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军.改写了我国服务机器人从未进人世界前5的纪录,标志着我国在该领域的研究取得了重要进展。图中是科大著名服务机器人“可佳”,如图所示,现要执行一项任务。给它设定了如下动作程序:机器人在平面内由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1 )沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点(5,5)沿直线运动到点(2,2)。该个过程中机器人所用时间是 s,则( )
s,则( )
| A.机器人的运动轨迹是一条直线 |
B.整个过程中机器人的位移大小为 m m |
| C.机器人不会两次通过同一点 |
| D.整个过程中机器人的平均速度为1.5m/s |
河水的流速为4m/s,一条船要从河的南岸A点沿与河岸成30°角的直线航行到北岸下游某处,则船的开行速度(相对于水的速度)最小 为
为
| A.2m/s | B.3 m/s m/s |
C. 4m/s 4m/s |
D.5m/s |
如图甲所示,静止在水平地面上的物块A,受到水平推力F的作用,F与时间t的关系如图乙所示,设物块与地面之间的最大静摩擦力 大小与滑动摩擦力大小相等,则
大小与滑动摩擦力大小相等,则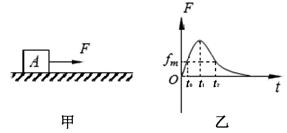
| A.0~t0时间内力F的功率逐渐增大 |
B.t1时刻A的动 能最大 能最大 |
| C.t2时刻A的速度最大 |
D.t2时刻后物 体做反方向运动 体做反方向运动 |
在水平地面上M点的正上方某一高度处,将S1球以初速度v1水平 向右抛出,同时在M点右方地面上N点处,将S2球以初速度v2斜向左上方抛出,两球恰在M、N连线的中点正上方相遇,不计空气阻力,则两球从抛出到相遇过程中
向右抛出,同时在M点右方地面上N点处,将S2球以初速度v2斜向左上方抛出,两球恰在M、N连线的中点正上方相遇,不计空气阻力,则两球从抛出到相遇过程中
| A.初速度大小关系为 v1 =" v2" | B.速度变化量相等 |
| C.水平位移相同 | D.都不是匀变速运动 |
A、B两物体的质量之比ma:mb=2:1,它们以相同的初速度v0在水平面上做匀减速直线运动(水平方向仅受到摩擦力作用),直到停止,其速度图象如图所示.那么, A、B两物体所受摩擦阻力之比Fa:Fb与A、B两物体克服摩擦阻力做的功之比Wa:Wb分别为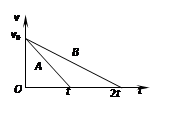
A. 4:1,2:1 B.2:1,4:1
C. 1:4,1:2 D. 1:2,1:4
如图所示,A、B两物体叠放在一起,处于一粗糙水平面上,运动过程中受到一水平拉力F的作用,两者相对静止一起向右做匀减速直线运动,则下列说法正确的是
A.B 对A的支持力对A做正功
对A的支持力对A做正功
B.B对A的摩擦力对A做不做功
C.B对A的摩擦力对A做负功
D.A对B的摩擦力对B做负功