如图是一个有光照或温度升高时排气风扇都能起动的自动控制装置,则图中的电风扇是模块机器人中的( )
| A.传感器 | B.执行器 | C.控制器 | D.敏感元件 |
如图,平行板电容器的两极板A、B接于电池两极,一带正电的小球悬挂在电容器内部,闭合S,电容器充电,这时悬线偏离竖直方向的夹角为θ()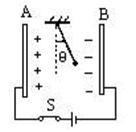
A.保持S闭合,将A板向B板靠近,则θ不变
B.保持S闭合,将A板向B板靠近,则θ增大
C.断开S,将A板向B板靠近,则θ不变
D.断开S,将A板向B板靠近,则θ增大
下列说法中一定正确的是()
| A.沿电场线方向场强逐渐减小 |
| B.沿电场线方向电势逐渐降低 |
| C.沿电场线方向移动电荷,电场力做正功 |
| D.沿电场线方向移动电荷,电场力不做功 |
某兴趣小组设计了一个火灾报警装置,其电路如图所示,R1、 R3为定值电阻,热敏电阻R2的阻值随温度t变化的关系是 ,通过电压表示数和灯泡亮度变化可监控R2所在处的火情.若R2所在处出现火情,则
,通过电压表示数和灯泡亮度变化可监控R2所在处的火情.若R2所在处出现火情,则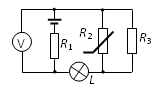
| A.电压表示数变大 | B.电压表示数变小 |
| C.灯泡变亮 | D.灯泡消耗的功率变大 |
在静电场中,一个电子只在电场力作用下,由A点沿直线运动到B点,在这个运动过程中,下列说法正确的是()
| A.该电子动能一定增大 | B.电子可能沿等势面运动 |
| C.A点的场强一定大于B点 | D.电子的电势能可能增加 |
关于电场强度E的说法正确的是()
| A.电场中某点的场强方向跟正电荷在该点所受的电场力的方向相同; |
| B.根据E=F/q可知,电场中某点的电场强度与电场力F成正比,与电量q成反比; |
| C.E是矢量,与F的方向一致; |
| D.公式E=kQ/r2对任何电场都适用。 |