位于坐标原点处的波源竖直向上振动,经过0.5s,O、M间第一次形成如图所示的波形,则下列说法正确的是( )

| A.该波的波长为3m |
| B.该波的周期为2.5s |
| C.再经过0.2s时间,质点N第一次到达波峰 |
| D.再经过0.6s时间,质点M的振动方向沿y轴负方向 |
甲、乙两车从同一地点出发同向运动,其v—t图像如图所示.下列说法正确的是()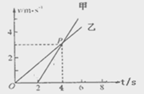
| A.从图中可看出乙比甲提前2s钟出发 |
| B.图中P点表示两车到达空间同一点 |
| C.甲.乙都是初速度为零的匀加速运动,且甲的加速度比乙的大 |
| D.4s之后乙在甲的后面 |
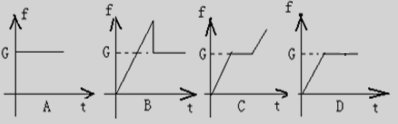
用一个水平推力F=Kt(K为恒量,t为时间)把一重为G的物体压在竖直的足够高的粗糙墙上,如图所示,从t=0开始物体所受的摩擦力f随时间t变化关系是哪一个()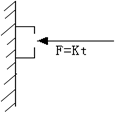
将一大小F=10N的力分解成F1和F2,则F1和F2可能存在的情况是()
| A.F1=5N,F2=25N | B.F1=1N,F2=13N | C.F1=500N,F2=505N | D.F1=10N,F2=36N |
已知心电图记录仪的出纸速度(纸带移动的速度)是2.0 cm/s,如图所示是仪器记录下来的某人的心电图,图中每个小方格的边长为0.5 cm,由此可知( )
| A.此人的心率约为60次/分 |
| B.此人的心率约为80次/分 |
| C.此人心脏每跳动一次所需时间约为0.5 s |
| D.此人心脏每跳动一次所需时间约为0.8 s |
下列对我们所学的几种性质力理解正确的是()
| A.物体的重力就是地球对物体的吸引力,它的方向总是垂直向下 |
| B.弹力产生于两接触且发生形变的物体之间,弹力的方向总是与施力物体形变方向相反 |
| C.滑动摩擦力一定产生于两运动的物体之间,且方向一定与物体运动方向相反 |
| D.摩擦力的作用效果就是阻碍物体的运动 |