如图,已知平面直角坐标系中,直线y=kx(k≠0)经过点(a,a)(a>0).线段BC的两个端点分别在x轴与直线y=kx上(B、C均与原点O不重合)滑动,且BC=2,分别作BP⊥x轴,CP⊥直线y=kx,交点为P,经探究在整个滑动过程中,P、O两点间的距离为定值 .
(2011山东青岛,11,3分)某车间加工120个零件后,采用了新工艺.工效是原来的1.5倍,这样加工同样多的零件就少用1小时.采用新工艺前每小时加工多少个零件?若设采用新工艺前每小时加工x个零件,则根据题意可列方程为.
某市今年起调整居民用水价格,每立方米水费上涨20%,小方家去年12月份的水费是26元,而今年5月份的水费是50元.已知小方家今年5月份的用水量比去年12月份多8立方米,设去年居民用水价格为x元/立方米,则所列方程为.
关于x的分式方程的解为正数,则m的取值范围是.
分式方程的解是 .
方程-=的解是.
试卷网 试题网 古诗词网 作文网 范文网
Copyright ©2020-2025 优题课 youtike.com 版权所有
粤ICP备20024846号
 a)(a>0).线段BC的两个端点分别在x轴与直线y=kx上(B、C均与原点O不重合)滑动,且BC=2,分别作BP⊥x轴,CP⊥直线y=kx,交点为P,经探究在整个滑动过程中,P、O两点间的距离为定值 .
a)(a>0).线段BC的两个端点分别在x轴与直线y=kx上(B、C均与原点O不重合)滑动,且BC=2,分别作BP⊥x轴,CP⊥直线y=kx,交点为P,经探究在整个滑动过程中,P、O两点间的距离为定值 .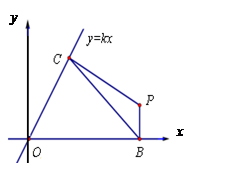
 的解为正数,则m的取值范围是.
的解为正数,则m的取值范围是. 的解是 .
的解是 . -
- =
= 的解是.
的解是.