在直角坐标平面内的机器人接受指令“[a,A]”(a≥0,0°<A<180°)后的行动结果为:在原地顺时针旋转A后,再向正前方沿直线行走a个单位长度.若机器人的位置在原点,正前方为y轴的负半轴,则它完成一次指令[2,60°]后位置的坐标为( )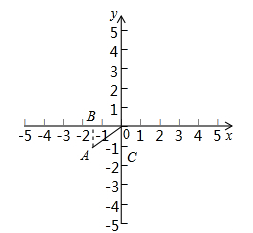
A.(-1, ) ) |
B.(-1,−) |
| C.(−,-1) |
D.(−,1) |
在同一平面内,三条直线的交点个数不能是().
| A.1个 | B.2个 | C.3个 | D.4个 |
有一种记分方法:以80分为基准,85分记为+5分,某同学得77分,则应记为().
| A.+3分 | B.-3分 | C.+7分 | D.-7分 |
一个数的平方等于它本身,这个数是().
| A.1 | B.1,0 | C.0 | D.0,±1 |
已知反比例函数y= (k>0)的图象与一次函数y=-x+6相交与第一象限的A、B两点,如图所示,过A、B两点分别做x、y轴的垂线,线段AC、BD相交与P,给出以下结论:①OA=OB;②△OAM∽△OBN;③若△ABP的面积是8,则k=5;④P点一定在直线y=x上,其中正确命题的个数是()个.
(k>0)的图象与一次函数y=-x+6相交与第一象限的A、B两点,如图所示,过A、B两点分别做x、y轴的垂线,线段AC、BD相交与P,给出以下结论:①OA=OB;②△OAM∽△OBN;③若△ABP的面积是8,则k=5;④P点一定在直线y=x上,其中正确命题的个数是()个.
A.1B.2C.3 D.4
如图,AB是半圆O直径,半径OC⊥AB,连接AC,∠CAB的平分线AD分别交OC于点E,交 于点D,连接CD、OD,以下三个结论:
于点D,连接CD、OD,以下三个结论:
①AC∥OD;②AC=2CD;③CD2=CE·CO,其中所有正确结论的序号是()
A.①②B.①③ C.②③D.①②③