如图,一个机器人从O点出发,向正东方向走3m,到达A1点,再向正北走6m到达A2点,再向正西走9m到达A3点,再向正南走12m,到达A4点,再向正东方向走15m到达A5点,按如此规律走下去,当机器人走到A6点时,A6点的坐标是( )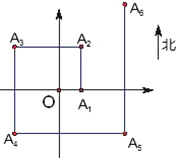
| A.(9,12) | B.(9,9) | C.(9,6) | D.(9,3) |
如图,正方形ABCD中,E为AB的中点,AF⊥DE于点O,则 等于()
等于()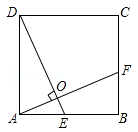
A. |
B. |
C. |
D. |
一个正方体的平面展开图如图所示,将它折成正方体后“设”字对面是()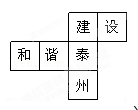
| A.和 | B.谐 | C.泰 | D.州 |
某校篮球班21名同学的身高如下表
| 身高cm |
180 |
186 |
188 |
192 |
208 |
| 人数(个) |
4 |
6 |
5 |
4 |
2 |
则该校篮球班21名同学身高的众数和中位数分别是(单位:cm)()
A.186,186 B.186,187
C.186,188D.208,188
已知,如图,AD与BC相交于点O,AB∥CD,如果∠B=20°,∠D=40°,那么∠BOD为()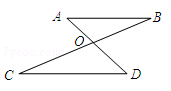
| A.40° | B.50° | C.60° | D.70° |
下列运算中正确的是()
| A.a+a=a2 | B.a•a2=a2 | C.(ab)2=a2b2 | D.(a2)3=a5 |