2008年我国成功实施了“神舟七号”载人飞船航天飞行,“神舟七号”飞行到31圈时,成功释放了伴飞小卫星,通过伴飞小卫星可以拍摄“神舟七号”的运行情况.若在无牵连的情况下伴飞小卫星与“神舟七号”保持相对静止.下述说法中正确的是( )
| A.伴飞小卫星和“神舟七号”飞船有相同的角速度 |
| B.伴飞小卫星绕地球沿圆轨道运动的速度比第一宇宙速度大 |
| C.宇航员在太空中的加速度小于地面上的重力加速度 |
| D.宇航员在太空中不受地球的万有引力作用,处于完全失重状态 |
一宇宙飞船沿椭圆轨道Ⅰ绕地球运行,机械能为E,通过远地点P时,速度为v,加速度大小为a,如图所示,当飞船运动到P时实施变轨,转到圆形轨道Ⅱ上运行,则飞船在轨道Ⅱ上运行时( ).
| A.速度大于v | B.加速度大小为a |
| C.机械能等于E | D.机械能大于E |
均匀带电的球壳在球外空间产生的电场等效于电荷集中于球心处产生的电场.如图所示,在半球面AB上均匀分布正电荷,总电荷量为q,球面半径为R,CD为通过半球顶点与球心O的轴线,在轴线上有M、N两点,OM=ON=2R.已知M点的场强大小为E,则N点的场强大小为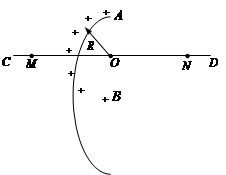
A. |
B. |
C. |
D. |
如图甲所示,在倾角为θ的斜面上固定有两根足够长的平行光滑导轨,两导轨间距为L,金属导体棒ab垂直于两导轨放在导轨上,导体棒ab的质量为m,电阻为R,导轨电阻不计,空间有垂直于导轨平面的匀强磁场,磁感应强度为B。当金属导体棒ab由静止开始向下滑动一段时间t0,再接通开关S,则关于导体棒ab 运动的v-t图象(如图乙所示)不可能的是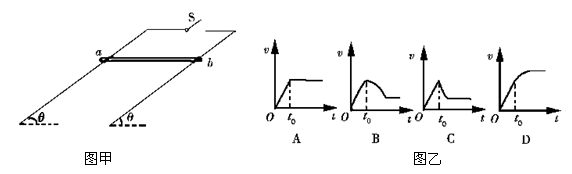
有一个消毒用电器P,电阻为20kΩ,它只有在电压高于24V时才能工作。今用一个光敏电阻R1对它进行控制,光敏电阻在光照时为100Ω,黑暗时为1000Ω。电源电动势E为36V,内阻不计,另有一个定值电阻R2 ,电阻为1000Ω。下列电路电键闭合后能使消毒用电器在光照时正常工作,黑暗时停止工作的是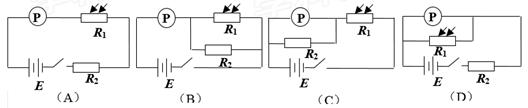
如图所示,一理想变压器原线圈匝数为n1=1000匝,副线圈匝数为n2=200匝,将原线圈接在u=200 sin100πt(V)的交流电压上,副线圈上电阻R和理想交流电压表并联接入电路,现在A、B两点间接入不同的电子元件,则下列说法正确的是
sin100πt(V)的交流电压上,副线圈上电阻R和理想交流电压表并联接入电路,现在A、B两点间接入不同的电子元件,则下列说法正确的是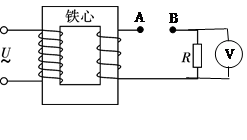
A.在A、B两点间串联一只电阻R,穿过铁芯的磁通量的最大变化率为0.2Wb/s
B.在A、B两点间接入理想二极管,电压表读数为40V
C.在A、B两点间接入一只电容器,只提高交流电频率,电压表读数增大
D.在A、B两点间接入一只电感线圈,只提高交流电频率,电阻R消耗电功率减小