中国机器人创意大赛于2014年7月15日在哈尔滨开幕.如图是一参赛队员设计的机器人比赛时行走的路径,机器人从A处先往东走4m,又往北走1.5m,遇到障碍后又往西走2m,再转向北走4.5m处往东一拐,仅走0.5m就到达了B.问机器人从点A到点B之间的距离是多少?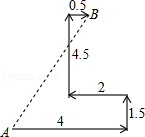
如图,在一个可以自由转动的转盘中,指针位置固定,三个扇形的面积都相等,且分别标有数字1,2,3.
(1)小明转动转盘一次,当转盘停止转动时,指针所指扇形中的数字是奇数的概率为 ;
(2)小明先转动转盘一次,当转盘停止转动时,记录下指针所指扇形中的数字;接着再转动转盘一次,当转盘停止转动时,再次记录下指针所指扇形中的数字,求这两个数字之和是3的倍数的概率(用画树状图或列表等方法求解).

如图,点 , , , 在一条直线上, , , .求证: .

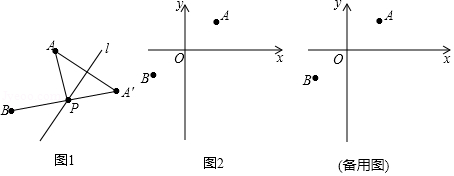
【定义】如图1, , 为直线 同侧的两点,过点 作直线 的对称点 ,连接 交直线 于点 ,连接 ,则称点 为点 , 关于直线 的“等角点”.
【运用】如图2,在平面直角坐标系 中,已知 , 两点.
(1) , , 三点中,点 是点 , 关于直线 的等角点;
(2)若直线 垂直于 轴,点 是点 , 关于直线 的等角点,其中 , ,求证: ;
(3)若点 是点 , 关于直线 的等角点,且点 位于直线 的右下方,当 时,求 的取值范围(直接写出结果).
如图,正方形 中, , 是 边的中点,点 是正方形内一动点, ,连接 ,将线段 绕点 逆时针旋转 得 ,连接 , .

(1)求证: ;
(2)若 , , 三点共线,连接 ,求线段 的长.
(3)求线段 长的最小值.
在平面直角坐标系 中,已知抛物线 为常数).
(1)若抛物线经过点 ,求 的值;
(2)若抛物线经过点 和点 ,且 ,求 的取值范围;
(3)若将抛物线向右平移1个单位长度得到新抛物线,当 时,新抛物线对应的函数有最小值 ,求 的值.