如图,质量相同的两物体a、b,用不可伸长的轻绳跨接在同一光滑的轻质定滑轮两侧,a在水平桌面的上方,b在水平粗糙桌面上。初始时用力压住b使a、b静止,撤去此压力后,a开始运动,在a下降的过程中,b始终未离开桌面。在此过程中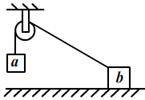
| A.a的动能小于b的动能 |
| B.两物体机械能的变化量相等 |
| C.a的重力势能的减小量大于两物体总动能的增加量 |
| D.绳的拉力对比对a所做的功与对b所做的功的代数和为零 |
对磁感应强度的定义式 的理解,下列说法正确的是
的理解,下列说法正确的是
A.磁感应强度 跟磁场力 跟磁场力 成正比,跟电流强度 成正比,跟电流强度 和导线长度 和导线长度 的乘积成反比 的乘积成反比 |
| B.如果通电导体在磁场中某处受到的磁场力等于0,则该处的磁感应强度也等于0 |
| C.公式表明,磁感应强度的方向与通电导体的受力的方向相同 |
| D.磁感应强度是由磁场本身决定的,不随、及的变化而变化 |
A、D分别是斜面的顶端、底端,B、C是斜面上的两个点,AB=BC=CD,E点在D点的正上方,与A等高。从E点水平抛出质量相等的两个小球,球1落在B点,球2落在C点,关于球1和球2从抛出到落在斜面上的运动过程()
A.球1和球2运动的时间之比为2∶1
B.球1和球2动能增加量之比为1∶2
C.球1和球2抛出时初速度之比为 ∶1
∶1
D.球1和球2运动时的加速度之比为1∶2
工业生产中需要物料配比的地方常用“吊斗式”电子秤,图甲所示的是“吊斗式”电子秤的结构图,其中实现称质量的关键性元件是拉力传感器。拉力传感器的内部电路如图所示,R1、R2、R3是定值电阻,R1=20k ,R2=10k,R0是对拉力敏感的应变片电阻,其电阻值随拉力变化的图象如图乙所示,已知料斗重1×103N,没装料时Uba=0,g取10m/s2。下列说法中正确的是()
,R2=10k,R0是对拉力敏感的应变片电阻,其电阻值随拉力变化的图象如图乙所示,已知料斗重1×103N,没装料时Uba=0,g取10m/s2。下列说法中正确的是()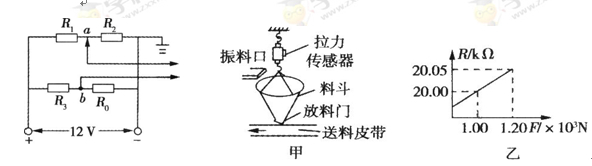
| A.R3阻值为40 k |
| B.装料时,R0的阻值逐渐变大,Uba的值逐渐变小 |
| C.拉力越大应变片电阻阻值也变大,Uba传感器的示数也变大 |
| D.应变片作用是把物体形变这个力学量转换为电压这个电学量 |
如图所示的电路,水平放置的平行板电容器中有一个带电液滴正好处于静止状态.为了使液滴竖直向上运动,下列操作可行的是( )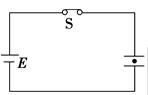
| A.断开开关,将两板间的距离拉大一些 |
| B.断开开关,将两板水平地向相反方向移开一些 |
| C.保持开关闭合,将两板间的距离减小一些 |
| D.保持开关闭合,以两板各自的左侧板沿为轴,同时向上(即逆时针方向)转过一个小角度 |
矿产资源是人类赖以生存和发展的物质基础,随着对资源的过度开采,地球资源的枯竭,已使我们的环境恶化,而宇航事业的发展为我们开辟了太空采矿的途径. 太空中进行开采项目,必须建立“太空加油站”。 假设“太空加油站”正在地球赤道平面内的圆周轨道上运行,其离地球表面的高度为同步卫星离地球表面高度的十分之一,且运行方向与地球自转方向一致。下列说法正确的有()
| A.“太空加油站”运行的加速度等于其所在高度处的重力加速度 |
B.“太空加油站”运行的速度等于同步卫星运行速度的 倍 倍 |
| C.站在地球赤道上的人观察到它向东运动 |
| D.在“太空加油站”工作的宇航员因不受重力而在舱中悬浮或静止 |