如图所示,竖直光滑杆固定不动,套在杆上的弹簧下端固定,将套在杆上的滑块向下压缩弹簧至离地高度h=0.1m处,滑块与弹簧不拴接.现由静止释放滑块,通过传感器测量到滑块的速度和离地高度h并作出滑块的Ek﹣h图象,其中高度从0.2m上升到0.35m范围内图象为直线,其余部分为曲线,以地面为零势能面,取g=10m/s2,由图象可知( )

| A.小滑块的质量为0.2kg |
| B.轻弹簧原长为0.2m |
| C.弹簧最大弹性势能为0.32J |
| D.小滑块的重力势能与弹簧的弹性势能总和最小为0.18J |
如图所示,质量都是m的物体A、B用轻质弹簧相连,静置于水平地面上,此时弹簧压缩了Δl.如果再给A一个竖直向下的力,使弹簧再压缩Δl(形变始终在弹性限度内),稳定后,突然撤去竖直向下的力,在A物体向上运动的过程中,下列说法正确的是()
| A. B物体受到的弹簧的弹力大小等于mg时,A物体的加速度最大 |
| B. B物体受到的弹簧的弹力大小等于mg时,A物体的速度最大 |
| C. A物体的最大加速度大小为1.2 g |
| D.B物体对地面的最大压力为2mg |
如图所示,两个小球从水平地面上方同一点O分别以初速度 、
、 水平抛出,落在地面上的位置分别是A、B,O′是O在地面上的竖直投影,且O′A:AB =1:3。若不计空气阻力,则两小球()
水平抛出,落在地面上的位置分别是A、B,O′是O在地面上的竖直投影,且O′A:AB =1:3。若不计空气阻力,则两小球()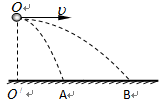
| A.抛出的初速度大小之比为1:4 |
| B.落地速度大小之比为1:3 |
| C.落地速度与水平地面夹角的正切值之比为1:3 |
D.通过的位移大小之比为1: |
下列说法中不正确的是()
A.根据速度定义式 ,当 ,当 非常非常小时, 非常非常小时, 就可以表示物体在t时刻的瞬时速度,该定义应用了极限思想方法。 就可以表示物体在t时刻的瞬时速度,该定义应用了极限思想方法。 |
| B.在探究加速度、力和质量三者之间关系时,先保持质量不变研究加速度与力的关系,再保持力不变研究加速度与质量的关系,该实验应用了控制变量法。 |
| C.在推导匀变速运动位移公式时,把整个运动过程划分成很多小段,每一小段近似看作匀速直线运动,然后把各小段的位移相加,这里采用了微元法。 |
| D.在不需要考虑物体本身的大小和形状时,用质点来代替物体的方法叫假设法。 |
电容式传感器是用来将各种非电信号转变为电信号的装置.由于电容器的电容C取决于极板正对面积S、极板间距离d以及极板间的电介质这几个因素,当某一物理量发生变化时就能引起上述某个因素的变化,从而又可推出另一个物理量的值,如图是四种电容式传感器的示意图,关于这四个传感器的作用下列说法正确的是
| A.甲图的传感器可以用来测量角度 |
| B.乙图的传感器可以用来测量液面的高度 |
| C.丙图的传感器可以用来测量压力 |
| D.丁图的传感器可以用来测量速度 |
如图是一个三输入端复合门电路,当C端输入为“1”时,A、B端输入为何时,输出端Y才会输出“1”
A.0 0 B.0 1 C.1 0 D.1 1