如图甲所示的光电门传感器是测定物体通过光电门的时间的仪器。其原理是发射端发出一束很细的红外线到接收端,当固定在运动物体上的一个已知宽度为d的挡光板通过光电门挡住红外线时,和它连接的数字计时器可记下挡光的时间△t,则可以求出运动物体通过光电门时的瞬时速度大小。

(1)为了减小测量瞬时速度的误差,应选择宽度比较 (选填“宽”或“窄”)的挡光板。
(2)图乙是某同学利用光电门传感器探究小车加速度与力之间关系的实验装置,他将该光电门固定在水平轨道上的B点,用不同重物通过细线拉同一小车,小车每次都从同一位置A点静止释放。
①如图丙所示,用游标卡尺测出挡光板的宽度d=___mm,实验时将小车从图乙A点静止释放,由数字计时器记下挡光板通过光电门时挡光时间间隔△t="0.02" s,则小车通过光电门时的瞬时速度大小为 m/s;(结果保留两位有效数字)
②实验中设小车的质量为m1,重物的质量为m2,则在m1与m2满足关系式 时可近似认为细线对小车的拉力大小与重物的重力大小相等;
③测出多组重物的质量m2和对应挡光板通过光电门的时间△t,并算出小车经过光电门时的速度v,通过描点作出两物理量的线性关系图象,可间接得出小车的加速度与力之间的关系。处理数据时应作出 图象(选填“v2 - m1”或“v2-m2”);
④某同学在③中作出的线性关系图象不过坐标原点,如图丁所示(图中的m表示m1或m2),其可能的原因是____ 。
(1)在“探究力的平行四边形定则”实验中,下列实验要求正确的是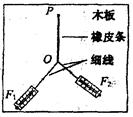
| A.弹簧测力计的拉力方向必须与木板平行 |
| B.两弹簧测力计的拉力方向必须相互垂直 |
| C.读数时,视线应正对弹簧测力计的刻度 |
| D.使用弹簧测力计时,不能超过其量程 |
(2)如图为某研究性学习小组设计的“验证机械能守恒定律”的实验装置.小圆柱由一根不可伸长的轻绳拴住,轻绳另一端固定。将轻绳拉至水平后由静止释放,在最低点附近放置一组光电门,如图。测出小圆柱运动到最低点时通过光电门的时间 t,再用游标卡尺测出小圆柱的直径d,重力加速度为g.
①某同学测出了悬点到圆柱重心的距离为l,若等式gl=成立,则可验证小圆柱下摆过程机械能守恒;
②若小圆柱下摆过程中在误差允许范围内机械能守恒,用天平测出小圆柱的质量为m,则小圆柱下摆到最低点时绳子上拉力的理论值为;
③若在悬点O处安装一个拉力传感器,且在最低点时拉力传感器测出绳子上拉力比理论值偏大些,请分析可能的原因.(写出1条即可)
如图甲所示是某同学设计的“探究加速度a与力F、质量m的关系”的实验装置图,实验中认为细绳对小车拉力F等于砂和砂桶总重力,小车运动加速度。可由纸带求得。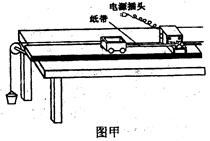
(1)该同学对于该实验的认识,下列说法中正确的是
A.该实验应用了等效替代的思想方法
B.该实验应用了控制变量的思想方法
C.实验时必须先接通电源后释放小车
D.实验中认为细绳对小车拉力F等于砂和砂桶总重力,其前提必须保证砂和砂桶总质量远远大于小车的质量
(2)如图乙所示是该同学在某次实验中利用打点计时器打出的一条纸带,A、B、C、D、E、F是该同学在纸带上选取的六个计数点,其中计数点间还有若干个点未标出,设相邻两个计数点间的时间间隔为T.该同学用刻度尺测出AC间的距离为S1,BD间的距离为S2,则打B点时小车运动的速度 =,小车运动的加速度a=.
=,小车运动的加速度a=.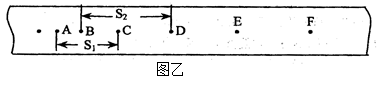
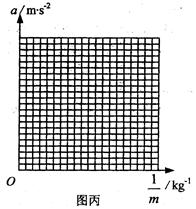
(3)某实验小组在实验时保持砂和砂桶质量不变,改变小车质量m,分别得到小车加速度a与质量m及对应的 数据如表中所示.根据表中数据,在图丙坐标纸中作出F不变时a与的图像.
数据如表中所示.根据表中数据,在图丙坐标纸中作出F不变时a与的图像.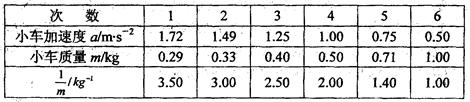
为了测量一节干电池的电动势和内阻,某实验小组按图甲所示的电路图连好实验电路,合上开关,电流表和电压表的读数正常,当将滑动变阻器的滑片由A端向B端逐渐滑动时,发现电流表的示数逐渐增大,而电压表的示数接近1.5 V且几乎不变,直到当滑片滑至临近B端时电压表的示数急剧变化,这种情况很难读出电压数值分布均匀的几组不同的电流值、电压值,出现上述情况的原因是________________.改进方法是_______________.改进后,测出几组电流、电压的数值,并画出如图乙所示的图象,由图象可知,这个电池的电动势为E=________V,内阻r=________ Ω.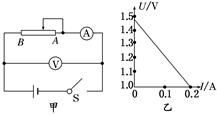
写出下面两图读数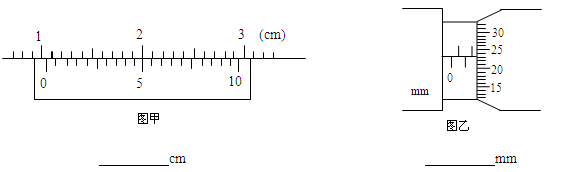
验证机械能守恒定律的实验采用重物自由下落的方法:
(1).用公式
 时对纸带上起点的要求是 ,为此目的,所选择的纸带第1,2两点间距应接近 .
时对纸带上起点的要求是 ,为此目的,所选择的纸带第1,2两点间距应接近 .
(2).若实验中所用重锤质量m=1kg,打点纸带如下图所示,打点时间间隔为0.02s,则记录B点时,重锤的速度 = ,重锤动能
= ,重锤动能 = .从开始下落起至B点,重锤的重力势能减少量是ΔEP= ,因此可以得出的结论是 .(g="10" m/s2)
= .从开始下落起至B点,重锤的重力势能减少量是ΔEP= ,因此可以得出的结论是 .(g="10" m/s2)
(3).即使在实验操作规范,数据测量及数据处理很准确的前提下,该实验求得的ΔEP也一定略ΔEK(填大于或小于),这是实验存在系统误差的必然结果,该系统误差产生的主要原因是。
(4).根据纸带算出相关各点的速度υ,量出下落的距离h,则以 为纵轴,以h为横轴画出的图线应是下图中的()
为纵轴,以h为横轴画出的图线应是下图中的()