WiFi是将电脑、手机与互联网以无线方式连接的技术,可进行信息、文件等材料的无线传输,此过程中各种信息是靠 来传输的,它在真空中的传播速度是 。

在学完摩擦起电后,小明用毛皮摩擦过的橡胶棒靠近悬挂着的通草球,发现通草球被吸引,则通草球______带电;若通草球被排斥,则通草球______带电.(填“可能”、“一定”或“一定不”).
如图所示,将电铃放到玻璃钟罩中,用抽气机抽去空气,接通开关,使电铃工作,这时几乎_________铃声(选填“听到”、“听不到”),慢慢地放人空气,铃声会____________.(选填“变大”、“变小”或“不变”)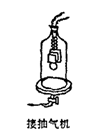
如图所示,取一只可乐罐,在其底部开一个圆孔(直径为5cm),除去盖子,蒙上一张牛皮纸。在桌子上每隔5cm沿一条直线放置一支点燃的蜡烛,用手敲击一下纸膜,会看到蜡烛火焰由近及远逐一被“吹斜”,可以得到的结论是:。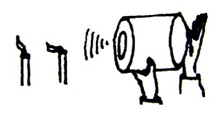
夏天对着开水杯“吹气”,能使开水变凉,这是因为________,使水温下降。冬天对着手“哈气”,使手变暖,这是因为水气遇冷________,使手表面温度升高。
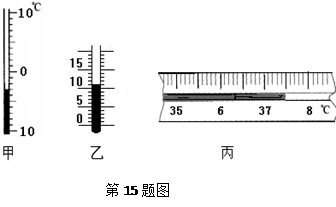
在一个大气压下冰水混合物的温度是0C,沸水的温度是0C.人的正常体温是0C.如图所示,各温度计的读数分别为:甲:0C乙:0C丙:0C.