小金用如图所示的实验装置测量杠杆的机械效率。实验时竖直向上拉动杠杆,使挂在杠杆下面的钩码缓缓上升。(支点和杠杆的摩擦不计)问:
(1)重为 的钩码挂在 点时,人的拉力 为 ,钩码上升 时,动力作用点 上升 ,此时机械效率 为多大?
(2)小金为了进一步研究杠杆的机械效率与哪些因素有关,仍用该实验装置,将钩码移到 点,再次缓慢提升杠杆使动力作用点 仍然上升 。问:人的拉力 与第一次相比 变小 (选填“变大”“变小”或“不变” 。比较此时的机械效率 与 的大小并用学过的知识给以推导。

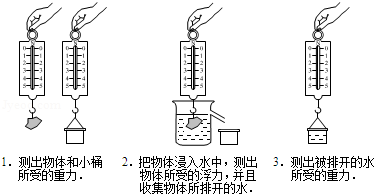
杨林他们实验小组在探究“浮力大小等于什么”的实验中,利用器材进行了如图的实验,并将实验数据填入下表。
|
实验次数 |
物重 |
空桶重 |
拉力 |
桶与水重 |
浮力 |
排开水重 |
|
1 |
0.6 |
0.1 |
0.3 |
0.3 |
0.3 |
0.2 |
|
2 |
1.1 |
0.1 |
0.6 |
0.6 |
0.5 |
0.5 |
|
3 |
3.0 |
0.1 |
2.0 |
1.1 |
|
1.0 |
(1)将表格中第三行的数据补充完整。
(2)在进行数据分析时发现,第一组数据明显与其他组数据反映的规律不符。为了得出结论,他将第一组数据中的桶与水重 改为 ,排开的水重 改为 .请你评价他的这种做法: 。针对此实验数据,你的做法是 。
完成上述实验后,该组同学还想知道物体受到的浮力与液体密度是否有关,利用上面的器材,设计了如下实验,对其中一个物体在水中和盐水中所受浮力进行探究:
①测出物体在空气中的重力 ;
②将物体浸没在水中某一深度,读出弹簧测力计示数 ;
③将该物体浸没在盐水中同一深度,再次读出弹簧测力计示数 ;
如果 ,则说明物体受到的浮力大小与液体密度 ;
如果 ,则说明物体受到的浮力大小与液体密度 ,写出盐水密度的表达式 。( 已知)
在鄂尔多斯车友会举办活动中,张明的自行车停放在烈日下,车胎自己爆裂的事故,他分析后猜想:一定质量的气体,在体积不变时,气体压强与温度有关。根据猜想,他做了如图所示的探究实验:将烧瓶的一端连接在压强计上,用压强计中的水银柱在烧瓶中密闭一定质量的空气。将烧瓶放入水中,给水槽中的水加热,水温上升。每隔一段时间同时用温度计和压强计测量水的温度值(即为瓶中密闭气体的温度值)及密闭空气此时的压强值。在每次测量时都使压强计左侧水银液面保持在图中 点的位置不变,各次测量实验数据记录如下:
|
气体的温度 |
20 |
30 |
40 |
50 |
|
|
气体的压强 |
|
|
|
|
(1)实验过程中,瓶中密闭气体的温度是通过测量 的温度得到的。
(2)分析上表中实验数据可知,一定量的气体,在 保持不变时, 。
(3)在炎热的夏天,载重汽车在盘山公路下坡行驶时,要不断往车上喷水,主要是通过水的汽化吸热使轮胎内气体的 来减小轮胎内气体的压强,防止爆胎。

如图1所示,研究并联电路中干路电流与各支路电流的关系。
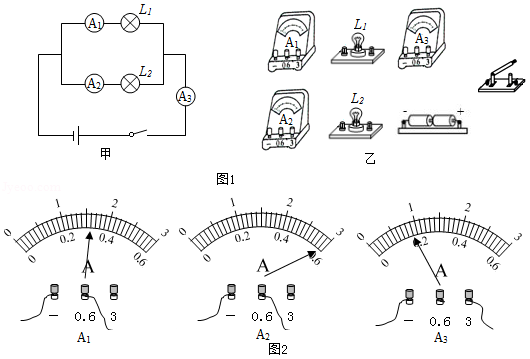
(1)以笔画线代替导线,如图1,按电路甲把实物图乙连接起来。(导线不许交叉)。
(2)连完电路后,闭合开关,三个电流表的示数如图2所示,则 的示数 是 . 的示数 是 , 的示数 是 。
(3)由上述三个电流的数值,可近似得出电流关系式为: 。
某同学要测量一块密度为 的铁块的质量。
(1)他把天平放在水平桌面上,将游码移到标尺左端零刻度线处,如果天平指针偏左,应该向 (填“左”或“右”)调节平衡螺母。
(2)称量时天平平衡后,放在右盘中的砝码与游码位置如图所示,则铁块的质量为 ,体积为 。
(3)如果把此铁块挂在弹簧测力计下浸没在水中,弹簧测力计对铁块的拉力为 . 取

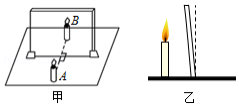
在“探究平面镜成像特点”实验中,如图1所示,在桌面上铺一张图象纸,在纸的中间沿横线竖直放置一块较薄的玻璃板代替平面镜,把一支点燃的蜡烛 放在玻璃板前,可看到它在玻璃板后的像,再拿一只相同但不点燃的蜡烛 ,竖立在玻璃板后,移动位置,使 跟 的像重合。
(1)通过图象纸,可方便准确地得出结论,像距 (填“大于”、“小于”或“等于”)物距。
(2)蜡烛 与 的像重合,说明像与物大小 (“相等”成“不相等”)。
(3)玻璃板后不点燃的蜡烛 ,却好象点燃了。说明像是 (填“虚“或“实”)像,若在像的位置放一光屏,光屏 (填“能“或“不能”)承接到像。
(4)如图2所示,如果玻璃板没有竖直放置,实验中会出现的情况是 。