小明在探究影响滑动摩擦力大小的因素时,提出了如下猜想:
猜想一:滑动摩擦力的大小与接触面所受的压力有关
猜想二:滑动摩擦力的大小与接触面的粗糙程度有关
猜想三:滑动摩擦力的大小与接触面积有关
为了验证猜想,准备了如下器材:弹簧测力计、长木板、长方体木块和砝码。
他利用上述器材进行了如下实验:
①将木块平放在长木板上组装成如图1所示的装置。匀速拉动长木板,记下弹簧测力计的示数。

②在木块上加砝码,如图2所示。匀速拉动长木板,记下弹簧测力计的示数。
完成下列任务:
(1)在图3中画出长木板被匀速拉动时(木块相对桌面静止),长木板在水平方向上的受力示意图。
(2)通过实验步骤①②可验证猜想 一 。
(3)要完成对“猜想三”的验证,需在实验步骤①的基础上进一步实验,请你写出下一步的实验方案。
自动驾驶汽车是一种通过电脑系统实现无人驾驶的智能汽车,正不断走进我们的生活。
(1)驾驶员进入汽车后,电脑系统会对驾驶员的脸部特征进行识别。从生物学角度看,人的脸部特征是由 决定的。
(2)2019年8月,红旗 自动驾驶汽车在湖南长沙开展测试。汽车从长沙出发,历时3小时20分钟到达武汉,行驶距离286千米。测试过程中红旗 汽车的平均速度是多少千米 时?
(3)质量为1.8吨的红旗 自动驾驶汽车,在水平公路上匀速直线行驶时,受到的阻力为车重的0.2倍,此时汽车受到的牵引力为多少牛?
小明在卸货点用水平方向的推力把箱子推到 处,如图甲。经过 处4秒后在 处遇到方方,方方迅速取下小箱子,1秒后在 处小明调整了推力,继续将大箱子推到 处才撤去推力。 段推力与时间的关系如图乙,箱子速度与时间的关系如图丙。已知大箱子底面积为0.5平方米,质量为20千克,小箱子质量为5千克。

(1) 段大箱子受到的摩擦力大小为 。
(2) 段大箱子对地面的压强为 。
(3) 段小明推力所做的功为 。
2019年12月17日,由我国自主建造的第一艘国产航母
山东舰(如图甲),正式交付海军。该舰标准排水量为5万吨,可同时停放36架歼
舰载机。若每架舰载机质量为25吨。(海水的密度取
千克
立方米)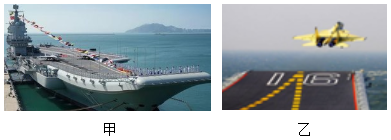
(1)舰载机起飞时(如图乙),以舰载机为参照物,航母是 的。(选填“运动”或“静止”
(2)在标准排水量时,航母所受的浮力为 。
(3)当36架舰载机全部飞离航母后、航母排开海水的体积减少了 立方米。(结果保留一位小数)
如图电路中,电源电压恒为 ,灯泡 规格为“ ”。闭合开关,灯泡正常工作。求:
(1)电阻 的阻值。
(2)灯泡工作5分钟消耗的电能及电阻 产生的热量。

把一根两端开口的细管浸入水中,充满水后用手指把一端堵住,移出水面,如图甲所示
(1) 端的水不会流下来是由于受到 作用。
(2)把手指移开后管内的水会怎样流动,不同的同学会有不同的猜想,而检验猜想是否正确最直接的方法是 。
(3)把细管倒过来,如图乙所示。如果把手指移开,管内的水会不会从 端流出?请写出你的判断,并用你所学的理论知识证明你的判断。
