如图是小金研究电动机转动是否对小灯泡的亮度有影响的电路图,开始小金先抓住转轴合上开关,观察小灯泡的亮度,接着放开转轴让电动机转动,继续观察小灯泡亮度的变化(已知:小灯泡的电阻为 ,电动机线圈电阻为 ,电源电压为 ,由此请你回答:
(1)在电动机未转动时, 时间内电流在电路中产生的热量为 (填写表达式);
(2)在电动机转动时,电流所做的功 电流在电路中产生的热量(选填“大于”“等于”或“小于” ;
(3)小金判断电动机转动后小灯泡会更亮,你认为小金的判断正确吗?并根据学过的知识给以解释。

如图甲是小明做“测量小灯泡电功率”的实验的电路图,已知电源电压为3V,小灯泡的额定电压为2.5V(阻值约为10W)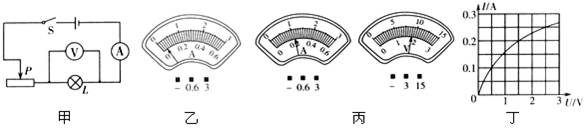
(1)小明在检查仪器时,发现电流表指针如图乙所示,则接下来的操作是。
(2)小明在连接电路时,开关S应,电压表应选择量程,闭合开关前滑片P应置于图中(选填“最左端”或“最右端”)的位置。
(3)经检查无误后,闭合开关,调节滑动变阻器的滑片到某一位置,电流表和电压表的示数如图丙所示,则此时流过小灯泡的电流是A,灯泡两端的电压是V,灯泡的实际功率是W。
(4)改变滑动变阻器的阻值,多次测量通过小灯泡的电流和它两端的电压,根据记录的数据,小明画出了小灯泡电流随其两端电压变化的关系图像(如图丁),根据图像提供的信息,计算出小灯泡的额定功率为W,小灯泡灯丝电阻随电压增大而(选填“增大”、“减小”或“不变”)。
做物理实验要遵循实事求是的原则。芳芳同学按照图所示装置对动滑轮特点进行了探究,记录的数据如下表:

通过分析数据。她觉得与“使用动滑轮能省一半的力”的结论偏差较大。你一定也做过这样的实验,回想你的实验经历,回答下列问题:
(1)该实验中出现这样结果的主要原因是,除此之外弹簧测力计还应沿方向做运动时“使用动滑轮能省一半的力”。
(2)分析表中数据你还发现:随物重的增大该装置的机械效率(选填“增大”、“减小”或“不变”)。
根据对表中几种物质的比热容比较和分析,回答下列问题:
| 物质 |
水银 |
沙石 |
水 |
冰 |
| 比热容J/(kg·℃) |
0.14×103 |
0.92×103 |
4.2×103 |
2.1×103 |
(1)制作体温计常用做介质,原因之一是。
(2)北方楼房中的暖气用水做介质,利用了特性。
(3)一杯质量为0.2kg的水温度从70℃降到20℃。在此过程中,水放出的热量为J,水的比热容(选填“增大”、“减小”或“不变”)。
同学们做实验的装置如图所示,闭合开关,如果将导体ab水平向右移动,则:
(1)导体cd将(选填“随”或“不随”)之运动起来。
(2)实验装置左侧运用的原理和(选填“电动机”、“发电机”或“扬声器”)相同;
(3)实验装置右侧产生的现象在生活中的应用是(举—个实例)。
小王为了探究物体浮力大小跟物体排开液体体积及在水中不同深度所受浮力变化情况,将一挂在弹簧测力计下的圆柱体金属块缓慢浸入水中(水足够深),在圆柱体接触容器底之前,分别记下圆柱体下表面所处的不同深度h和弹簧测力计相应的示数F,实验数据如下表:
(1)分析表中实验数据,可以得出物体重N,物体受到的最大浮力为N。
| 次数 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
| h/cm |
0 |
2 |
4 |
6 |
8 |
10 |
12 |
| F/N |
5.75 |
5.25 |
4.75 |
4.25 |
3.75 |
3.75 |
3.75 |
(2)表中第1次到第5次实验数据,说明了浸在液体中的物体受到浮力大小与物体排开液体体积(填“有关”或“无关”);分析表中第6次和第7次实验数据,说明了浸没在液体中的物体受到浮力大小与深度(填“有关”或“无关”)。
(3)下图中能正确反映F和h关系的图像是()