如图为某款擦窗机器人,它凭借其底部的真空泵在机身和玻璃之间形成低气压,牢牢地吸附在竖直玻璃上。请回答:
(1)当它静止在竖直玻璃上时,受到的摩擦力方向是 。
(2)擦窗机器人的擦拭速度是4分钟 米 ,要擦完总面积为3米 的窗玻璃需要 分钟。
(3)工作时擦窗机器人对玻璃的压力为28牛,内外气压差达到800帕,求擦窗机器人与玻璃的接触面积至少为多少平方米?
(4)擦窗机器人的总质量为1.2千克,工作时的实际功率为80瓦,它在竖直向上擦窗过程中有 的电能用于克服重力做功。若窗户足够高,持续竖直向上擦窗20分钟,擦窗机器人可上升的最大高度为多少米?(取 牛 千克)

景宣同学想用天平和量筒测量家中新买的马铃薯的密度.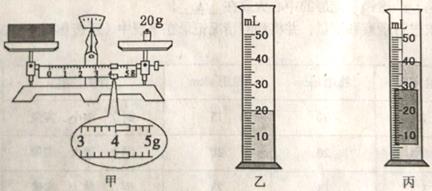
(1)在天平调节过程中发现指针指向分度盘的左侧,应将平衡螺母向端调节,使横梁平衡。
(2)从马铃薯上取下一块,用调节好的天平称其质量,右盘中的砝码和游码的位置如图甲所示,则这块马铃薯的质量是g。
(3)景宣同学在量筒中装入适量的水,再用细线吊着马铃薯块,使马铃薯块浸没在水中,两次量筒中的液面位置如图乙、丙所示,则马铃薯块的体积为cm3,密度为g/cm3。
(4)如果先测出水和马铃薯块的总体积,再取出马铃薯块,读出量筒中水的体积,这样算出马铃薯块的体积后,求得的密度与真实值相比偏。
(5)马铃薯块由接触水面到如图丙所示位置的过程,所受浮力如何变化?。
下面是凯唯同学做的两个力学探究实验。
(1)他的家帮妈妈和面时,发现碗在面粉上压出痕迹,为此他想探究压力作用效果与哪些因素有关。
①在同一个碗中装入不同量的水时,发现水越多,碗底在面粉上形成的压痕越深,于是他得出:当受力面积一定时,压力越大,压力作用效果越;
②他再把不同型号的空碗(底面积不同)分别放在面粉上,发现产生的压痕深浅相同,为此他又得出结论:压力的作用效果与受力面积无关。他这样操作得出结论是否正确?,理由是:。
(2)如图所示为凯唯同学探究“阻力对物体运动的影响”的实验装置。
①每次小车从斜面同一高度自由滑下是为了使小车到达水平面的相同;
②在水面桌面上分别铺上棉布、木板的目的是改变小车所受的大小;
③实验时发现小车在你棉布表面运动速度减小得较快,在木板上运动速度减小得较慢,设想小车在绝对光滑的木板上运动,它的速度将。
在“探究凸透镜成像规律”的实验中:
(1)将蜡烛、凸透镜、光屏依次摆放在光具座上,为了使蜡烛的像成在光屏中央,使蜡烛、凸透镜和光屏的中心大致在。
(2)按要求进行观察和测量,并将观测情况记录在下表中(透镜焦距f=10cm)。
| 实验序号 |
物距u/cm |
像距v/cm |
像的性质 |
| 1 |
30 |
15 |
倒立、缩小、实像 |
| 2 |
20 |
20 |
倒立、等大、实像 |
| 3 |
18 |
23 |
倒立、放大、实像 |
| 4 |
15 |
倒立、放大、实像 |
|
| 5 |
6 |
正立、放大、虚像 |
①根据上表信息,试判断:当物距u=25cm时,成倒立、的实像;
②根据折射现象中光路是的,得出第4次实验的像距v=cm;
③第5次实验,要观察到正立、放大的虚像,眼睛应与蜡烛在凸透镜的(选填“同”或“异”)侧;
④通过对实验数据的分析可得出,倍焦距处是放大与缩小的实像的分界点。
如图甲所示,两名同学分别用完全相同的装置探究“水沸腾时温度变化的特点”,绘制了a、b两杯水温度随时间变化的图象(如图乙):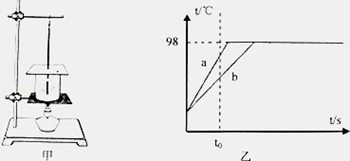
(1)实验时烧杯上覆盖硬纸板的目的是,以便缩短加热时间。
(2)通过分析图象信息可知:此时大气压(选填“大于”、“等于”或“小于”)标准大气压。
(3)通过实验得到水沸腾必须满足的条件是①,②不断吸热。
(4)a、b两杯水加热至沸腾所需时间不同的原因是。
(5)从开始加热到t0时刻,a、b两杯水吸收的热量分别为Qa和Qb,则QaQb(选填“大于”“等于”或“小于”)。
如图甲是小丽“测定小灯泡电阻”实验的实物图。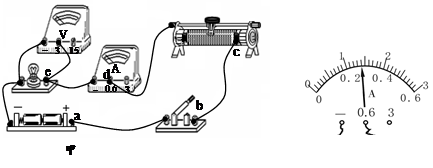
(1)连接好电路,闭合开关前滑动变阻器滑片应该移到阻值最大处;
(2)闭合开关,移动滑动变阻器滑片,当电压表示数为2.80伏时, 电流表示数如图乙,示数为安,此时小灯泡的电阻为欧;
(3)在实验过程中,发现在开关闭合的情况下,小灯泡突然不亮,电压表和电流表均无示数。小丽认为可能是电路某处断路,于是用一根导线检测,实验步骤和现象如下表。
| 实验步骤 |
导线两端接触位置 |
电灯 |
电流表 |
电压表 |
| ① |
ad |
亮 |
有示数 |
有示数 |
| ② |
ae |
亮 |
无示数 |
有示数 |
| ③ |
ac |
不亮 |
无示数 |
无示数 |
| ④ |
ab |
不亮 |
无示数 |
无示数 |
小丽分析表中现象,判断出cd之间某处断路,同组同学指出实验步骤是没有必要做的。