如图所示,可视为质点的机器人通过磁铁吸附在船舷外壁面检测船体。壁面可视为斜面,与竖直方向夹角为 。船和机器人保持静止时,机器人仅受重力 、支持力 、摩擦力 和磁力 的作用,磁力垂直壁面。下列关系式正确的是( )

| A. |
|
B. |
|
C. |
|
D. |
|
如图所示为一列简谐横波t=0时刻的波动图象,已知波沿x轴正方向传播,波速大小为0.4m/s。则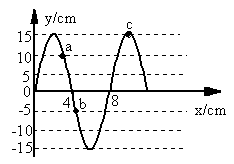
| A.在图示时刻质点a、b所受的回复力大小之比为2:1; |
| B.此时刻起,质点c的振动方程是y= 15cos10πt (cm); |
| C.只要是波长为8cm,且沿x轴负方向传播简谐横波都能与该波发生干涉; |
| D.在振动过程中质点a的振幅比质点b的大. |
下列说法中正确的是
| A.光的偏振现象证明了光波是纵波 |
| B.在发射无线电波时,需要进行调谐和解调 |
| C.在白炽灯的照射下从两块捏紧的玻璃板表面看到彩色条纹,这是光的干涉现象 |
| D.白天隔着白色羽毛观看太阳,会观察到条纹,这是光的衍射现象 |
如图甲所示,MN左侧有一垂直纸面向里的匀强磁场.现将一边长为l、质量为m、电阻为R的正方形金属线框置于该磁场中,使线框平面与磁场垂直,且bc边与磁场边界MN重合.当t= 0时,对线框施加一水平拉力F,使线框由静止开始向右做匀加速直线运动;当t = t0时,线框的ad边与磁场边界MN重合.图乙为拉力F随时间变化的图线,不计摩擦阻力.由以上条件可知,磁场的磁感应强度B的大小和感应电流方向分别为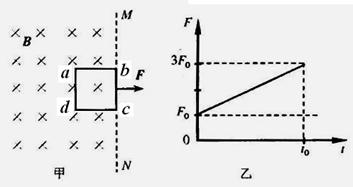
A. 电流方向abcda 电流方向abcda |
B. 电流方向adcba 电流方向adcba |
C. 电流方向abcda 电流方向abcda |
D. 电流方向abcda 电流方向abcda |
我国是一个消耗能源的大国,节约能源刻不容缓,设有一架直升飞机以加速度a从地面由静止开始时竖直向上起飞,已知飞机在上升过程中每秒钟的耗油量V=Pa+q(P、q均为常数),若直升飞机欲加速上升到某一高度处,且耗油量最小,则其加速度大小应为
A. |
B. |
C. |
D. |
发射通信卫星的常用方法是,先用火箭将卫星送入一近地椭圆轨道(近地点在地面附近,远地点在地球同步轨道处)运行,然后再适时开动星载火箭,将其送上与地球自转同步运行的轨道,那么
| A.变轨后瞬间与变轨前瞬间相比, 卫星的机械能增大,动能减小 |
| B.变轨后瞬间与变轨前瞬间相比, 卫星的机械能增大,动能增大 |
| C.变轨后卫星运行速度一定比变轨前卫星在椭圆轨道上运行时的最大速度要大 |
| D.变轨后卫星运行速度一定比变轨前卫星在椭圆轨道上运行时的最小速度要小 |