北京冬奥会引入的AI评分系统,能逐帧抓取运动员从起跳到落地之间的空中姿态,将运动员的精彩表现在最短时间内真切地呈现给观众,为裁判评分提供可视依据。如图所示,某次比赛系统呈现运动员上升( )及下落( )瞬间,下列说法中正确的是( )

| A. |
运动员在 段重力势能增大,动能减小 |
| B. |
运动员在 段重力势能减小,动能增大 |
| C. |
运动员在 段重力势能减小,动能减小 |
| D. |
运动员在 段重力势能增大,动能增大 |
“悬空的磁环”实验中,若所用的磁环都一样,中间的塑料管是光滑的。当甲、乙两个磁环处于静止状态时,它们之间的距离为h1,如图所示。 再往乙的正上方套入丙磁环,当丙悬空并静止后,甲、乙之间的距离变为h2,乙、丙之间的距离为h3。已知磁环间的斥力随它们距离的减小而增大,则h1、h2、h3之间的大小关系满足()
| A.h1>h2h2>h3 | B.h1>h2h2<h3 | C.h1<h2h2=h3 | D.h1<h2h2<h3 |
如图所示,不旋转的铝块在强大压力作用下顶住高速旋转的铜块,铜块瞬间停止转动,两者粘合在一起,这就是“旋转焊接”技术。下列对焊接过程的理解,错误的是()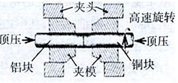
| A.强大的压力可以使两者之间产生很大的摩擦力 |
| B.使铜块高速旋转目的是为了增大铜块的惯性 |
| C.铜块内能增加是通过做功的方式来实现 |
| D.铜块和铝块增加的内能是由铜块的机械能转化而来 |
若图中猫的头部位置保持不变,把镜子沿MN截成两半,并分别向两侧平移一段距离,则猫的头部通过左、右两半面镜子()
| A.都不能成像 |
| B.各成半个像,合起来成一个完整的像 |
| C.都成完整的像,且两个像在同一位置 |
| D.都成完整的像,且两个像在不同位置 |
把一个物体挂在弹簧秤下,弹簧秤示数为3N,把它浸没在水(密度为1.0g/cm3)中时,弹簧秤示数变为2N。假设物体的质量为m,物体的密度为ρ,浸没在水中时物体的上下表面所受的压力差和压强差分别为△F和△P,则无法求得的是()
| A.m | B.ρ | C.△F | D.△P |
如图所示的电路,闭合开关S,当滑片P向右移动过程中()
| A.小灯泡变亮 | B.电流表示数变大 | C.电压表示数变小 | D.电路的总功率变大 |