为了测定电源电动势E的大小、内电阻r和定值电阻R0的阻值,某同学利用DIS设计了如图甲所示的电路。闭合电键S1,调节滑动变阻器的滑动触头P向某一方向移动时,用电压传感器1、电压传感器2和电流传感器测得数据,并根据测量数据计算机分别描绘了如图乙所示的M、N两条U—I直线。请回答下列问题:
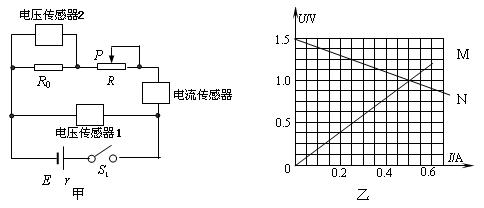
(1)根据图乙中的M、N两条直线可知( )
A.直线M是根据电压传感器1和电流传感器的数据画得的
B.直线M是根据电压传感器2和电流传感器的数据画得的
C.直线N是根据电压传感器1和电流传感器的数据画得的
D.直线N是根据电压传感器2和电流传感器的数据画得的
(2)图像中两直线交点处电路中的工作状态是( )
A.滑动变阻器的滑动头P滑到了最左端 B.该电源在该电路中的输出功率最大
C.定值电阻R0上消耗的功率为0.5W D.该电源在该电路中的效率达到最大值
(3)根据图乙可以求得定值电阻R0= ____Ω,电源电动势E = ___ V,内电阻r = ____Ω。
如图,板长为L、间距为d的平行金属板水平放置,两板间所加电压大小为U,足够大光屏PQ与板的右端相距为a,且与板垂直。一带正电的粒子以初速度 0沿两板间的中心线射入,射出电场时粒子速度的偏转角为37°。已知sin37°=0.6,cos37°=0.8,不计粒子的重力。
0沿两板间的中心线射入,射出电场时粒子速度的偏转角为37°。已知sin37°=0.6,cos37°=0.8,不计粒子的重力。
⑴求粒子的比荷q/m;
⑵若在两板右侧MN、光屏PQ间加如图所示的匀强磁场,要使粒子不打在光屏上,求磁场的磁感应强度大小B的取值范围;
⑶若在两板右侧MN、光屏PQ间仅加电场强度大小为E0、方向垂直纸面向外的匀强电场。设初速度方向所在的直线与光屏交点为O点,取O点为坐标原点,水平向右为x正方向,垂直纸面向外为z轴的正方向,建立如图所示的坐标系,求粒子打在光屏上的坐标(x,y,z)。
如图,半径为R的光滑半圆形轨道ABC在竖直平面内,与水平轨道CD相切于C 点,D端有一被锁定的轻质压缩弹簧,弹簧左端连接在固定的挡板上,弹簧右端Q到C点的距离为2R。质量为m的滑块(视为质点)从轨道上的P点由静止滑下,刚好能运动到Q点,并能触发弹簧解除锁定,然后滑块被弹回,且刚好能通过圆轨道的最高点A。已知∠POC=60°,求:
⑴滑块第一次滑至圆形轨道最低点C时对轨道压力;
⑵滑块与水平轨道间的动摩擦因数μ;
⑶弹簧被锁定时具有的弹性势能。
如图,相距L=1m、电阻不计的平行光滑长金属导轨固定在绝缘水平面上,两导轨左端间接有阻值R=2Ω的电阻,导轨所在区域内加上与导轨所在平面垂直、方向相反的匀强磁场,磁场宽度d均为0.6m,磁感应强度大小B1= T、B2=0.8T。现有电阻r=1Ω的导体棒ab垂直导轨放置且接触良好,当导体棒ab从边界MN进入磁场后始终以速度
T、B2=0.8T。现有电阻r=1Ω的导体棒ab垂直导轨放置且接触良好,当导体棒ab从边界MN进入磁场后始终以速度 m/s作匀速运动,求:
m/s作匀速运动,求:
⑴棒ab在磁场B1中时克服安培力做功的功率;
⑵棒ab经过任意一个磁场B2区域过程中通过电阻R的电量;
⑶棒ab在磁场中匀速运动时电阻R两端电压的有效值。
某光源能发出波长λ=0.60μm的可见光,用它照射某金属可发生光电效应,产生光电子的最大初动能Ek=4.0×10-20J。已知普朗克常量 ,光速c=3.0×108m/s。求 (计算结果保留两位有效数字) :
,光速c=3.0×108m/s。求 (计算结果保留两位有效数字) :
①该可见光中每个光子的能量;
②该金属的逸出功。
如图所示,△ABC为等腰直角三棱镜的横截面,∠C=90°,一束激光a沿平行于AB边射入棱镜,经一次折射后射到BC边时,刚好能发生全反射,求该棱镜的折射率n。