某同学在做“测定木板与木块间动摩擦因数”的实验时,设计了两种实验方案。
方案一:木板固定,用弹簧测力计拉动木块,如图a所示.
方案二:用弹簧测力计钩住木块,用力拉动木板,如图b所示。除了实验必须的弹簧测力计、木块、木板、细线外,该同学还准备了若干重力均为2.00N的砝码.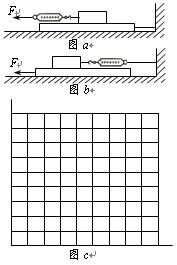
(1)上述两种方案中,你认为更合理的方案是______,理由是__________________________。
(2)该同学在木块上加放砝码,改变木块对木板的压力,记录了5组实验数据,如下表所示:
| 实验次数 |
1 |
2 |
3 |
4 |
5 |
| 砝码/个数 |
0 |
1 |
2 |
3 |
4 |
| 砝码对木块压力/N |
0 |
2.00 |
4.00 |
6.00 |
8.00 |
| 测力计读数/N |
1.50 |
2.00 |
2.50 |
2.90 |
3.50 |
请根据上述数据在图c坐标纸上做出摩擦力Ff和砝码对木块的压力FN的关系图象(以FN为横坐标)。
(3)由图象可知,木块的重力为 N。木块与木板间的动摩擦因数为 。
(9分)某同学用以下器材接成图1所示的电路,并将原微安表盘改画成如图2所示,成功地改装了一个简易的“R×1k”的欧姆表,使用中发现这个欧姆表用来测量阻值在10kΩ—20kΩ范围内的电阻时精确度令人满意,表盘上数字“15”为原微安表盘满偏电流一半处。所供器材如下:
| A.Ig=100μA的微安表一个 |
| B.电动势E=1.5V,电阻可忽略不计的电池 |
| C.阻值调至14kΩ电阻箱R一个 |
| D.红、黑测试表棒和导线若干 |
(1)原微安表的内阻Rg=Ω
(2)在图1电路的基础上,不换微安表和电池,图2的刻度也不改变,仅增加1个电阻,就能改装成“R×1”的欧姆表。要增加的电阻应接在________之间 (填a、b、c),规格为。(保留两位有效数字)
(3)画出改装成“R×1”的欧姆表后的电路图。
为了测定滑块与桌面之间的动摩擦因数,某同学设计了如图所示的实验装置。其中,a是质量为m的滑块(可视为质点),b是可以固定于桌面的滑槽(滑槽末端与桌面相切)。第一次实验时,将滑槽固定于水平桌面的右端,滑槽的末端与桌面的右端M对齐,让滑块a从滑槽上最高点由静止释放滑下,落在水平地面上的P点;第二次实验时,将滑槽固定于水平桌面的左端,测出滑槽的末端N与桌面的右端M的距离为L,让滑块 再次从滑槽上最高点由静止释放滑下,落在水平地面上的P'点。已知当地重力加速度为g,不计空气阻力。
再次从滑槽上最高点由静止释放滑下,落在水平地面上的P'点。已知当地重力加速度为g,不计空气阻力。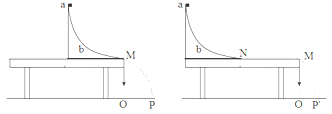
①实验还需要测量的物理量(用文字和字母表示):。
②写出滑块与桌面间的动摩擦因数的表达式是(用测得的物理量的字母表示): =
=
某同学用如图1所示的电路描绘一个标有“3V 0.25A”小灯泡的伏安特性曲线。他已选用的器材有:电池组(电动势为4.5V,内阻约1Ω);电流表(量程为0~250mA,内阻约5Ω);电压表(量程为0~3V,内阻约3kΩ);电键一个、导线若干。
(1)实验中所用的滑动变阻器应选择下面两种中的(填数字代号)。
①滑动变阻器(最大阻值20Ω,额定电流1A)②滑动变阻器(最大阻值1750Ω,额定电流0.3A)
(2)在图2中他已经连接了一部分电路,请你用笔画线代替导线将电路连线补充完整。
(3)闭合电键前滑动变阻器的滑片应该置于端(选填“a”、“b”)。
(4)为了得到伏安特性曲线,他以电压表的读数U为横轴,以电流表的读数I为纵轴,将实验中得到的多组数据进行了描点,如图3所示,请你帮他完成I-U图像。
(5)由实验得到的伏安特性曲线可以看出小灯泡的电阻随电压的增大而。
(6)如果将此小灯泡连入如图4所示电路,其中电源电动势为3V,电源内阻与保护电阻R0的总阻值为5Ω,定值电阻R的阻值为10Ω。开关S闭合后,通过小灯泡的电流是A(保留两位有效数字)
实验小组的同学做“用单摆测重力加速度”的实验。
(1)实验前他们根据单摆周期公式导出了重力加速度的表达式 ,其中L表示摆长,T表示周期。对于此式的理解,四位同学说出了自己的观点:
,其中L表示摆长,T表示周期。对于此式的理解,四位同学说出了自己的观点:
同学甲:T一定时,g与L成正比同学乙:L一定时,g与T2成反比
同学丙:L变化时,T2是不变的同学丁:L变化时,L与T2的比值是定值
其中观点正确的是同学(选填“甲”、 “乙”、“丙”、“丁”)。
(2)实验室有如下器材可供选用:
| A.长约1 m的细线 |
| B.长约1 m的橡皮绳 |
| C.直径约2 cm的均匀铁球 |
| D.直径约5cm的均匀木球 |
E.秒表
F.时钟
G.最小刻度为毫米的米尺
实验小组的同学选用了最小刻度为毫米的米尺,他们还需要从上述器材中选择:(填写器材前面的字母)。
(3)他们将符合实验要求的单摆悬挂在铁架台上,将其上端固定,下端自由下垂(如图所示)。用刻度尺测量悬点到之间的距离记为单摆的摆长L。
(4)在小球平稳摆动后,他们记录小球完成n次全振动的总时间t,则单摆的周期T=。
(5)如果实验得到的结果是g=10.29m/s2,比当地的重力加速度值大,分析可能是哪些不当的实际操作造成这种结果,并写出其中一种:。
如图所示为奥斯特实验所用装置,开关闭合前将小磁针置于水平桌面上,其上方附近的导线应与桌面平行且沿(选填“东西”、“南北”)方向放置,这是由于考虑到的影响;开关闭合后,小磁针偏转了一定角度,说明;如果将小磁针置于导线正上方附近,开关闭合后小磁针发生偏转(选填“会”、“不会”)。