如图所示,电路中,L为一自感线圈,两支路电阻相等,则( ) 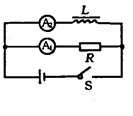
| A.闭合开关S时,稳定前电流表A1的示数小于电流表A2的示数 |
| B.闭合开关S时,稳定前电流表A1的示数等于电流表A2的示数 |
| C.闭合开关S时,稳定前电流表A1的示数大于电流表A2的示数 |
| D.断开开关S时,稳定前电流表A1的示数等于电流表A2的示数 |
某物体以30 m/ s的初速度竖直上抛,不计空气阻力(g取10 m/s2),5 s内物体的( )
s的初速度竖直上抛,不计空气阻力(g取10 m/s2),5 s内物体的( )
| A.路程为65 m |
| B.位移大小为25 m,方向向上 |
| C.速度改变量的大小为10 m/s |
| D.平均速度大小为13 m/s,方向向上 |
如图所示,甲、乙、丙、丁是以时间为横轴的匀变速直线运动的图象,下列说法正确的是( )
| A.甲是a-t图象 | B.乙是s-t图象 |
| C.丙是s-t图象 | D.丁是v-t图象 |
关于互成角度的两个初速度不为零的匀变速直线运动的合运动,下列说法正确的是:
| A.合运动的轨迹一定是抛物线 | B.合运动的性质一定是匀变速运动 |
| C.合运动的轨迹可能是直线,也可能是曲线 | D.合运动的性质无法确定 |
如图所示,图线a是线圈在匀强磁场中匀速转动时产生的正弦交流电的图像,当调整线圈转速后,所产生的正弦交流电的图像如图线b所示。以下关于这两个正弦交流电的说法中正确的是()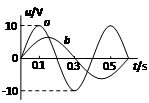
| A.线圈先后两次转速之比为1:2 |
| B.交流电a的电压瞬时值u=10sin0.4πt V |
| C.交流电b的最大值为20/3 V |
| D.在图中t=0时刻穿过线圈的磁通量为零 |
如图所示,水平面内两根光滑的平行金属导轨,左端与电阻R相连接,匀强磁场B竖直向下分布在导轨所在的空间内,质量一定的金属棒垂直于导轨并与导轨接触良好。若对金属棒施加一个水平向右的外力F,使金属棒从a位置由静止开始向右做匀加速运动并依次通过位置b和c。若导轨与金属棒的电阻不计,a到b与b到c的距离相等,则()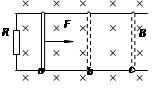
| A.金属棒通过b、c两位置时,电阻R的电功率之比为1:2 |
B.金属棒通过b、c两位置时,外力F的大小之比为1: |
| C.在从a到b与从b到c的两个过程中,电阻R上产生的热量之比为1:1 |
| D.在从a到b与从b到c的两个过程中,通过金属棒的横截面的电量之比为1:2 |