某同学为了测电流表 的内阻
的内阻 的精确值,准备了如下器材:
的精确值,准备了如下器材:
A.电流表:量程100mA,内阻约5
B.电压表 :量程15V,内阻约l0k
:量程15V,内阻约l0k
C.电压表 :量程3v,内阻约5k
:量程3v,内阻约5k
D.定值电阻 :阻值20
:阻值20
E.滑动变阻器 :0~10,额定电流为lA
:0~10,额定电流为lA
F.滑动变阻器 :0~1000,额定电流为0.2A
:0~1000,额定电流为0.2A
G.电源E:电动势为6v,内阻较小
H.导线、电键
要求:电流表的示数从零开始变化,且能多测几组数据,尽可能使电压表的表针偏转范围大。
实验中电压表应选用 ,滑动变阻器应选用 。(填器材前面的字母序号号)
在右上方虚线方框中画出测量用的电路图。
若选测量数据中的一组来
计算电流表的内阻,其中电压表的示数用U表示,电流表的示数用I表示,则所测电流表的内阻的表达式为 。
某同学利用如图甲的实验装置测量重力加速度大小。
(1)该同学开始实验时情形如图甲所示,接通电源释放纸带。请指出该同学在实验操作中存在的两处明显错误或不当的地方:
① ___________________________ ;②。
(2)该同学经修改错误并正确操作后得到如图乙所示的纸带,取连续六个点A、B、C、D、E、F为计数点,测得A点到B、C、D、E、F的距离分别为h1、h2、h3、h4、h5。若打点的频率为f,则打E点时重物的速度表达式VE=;该同学先分别计算出各计数点的速度值,并试画出速度的二次方(V2)与对应重物下落的距离(h)的关系如图丙所示,则重力加速度g=___________m/s2。
橡皮筋也像弹簧一样,在弹性限度内,伸长量x与弹力F成正比,即F=kx,k的值与橡皮筋未受到拉力时的长度L、横截面积S有关,理论与实践都表明k=YS/L,其中Y是一个由材料决定的常数,材料力学中称之为杨氏模量。

(1)有一段横截面是圆形的橡皮筋,应用如图甲所示的实验装置可以测量出它的杨氏模量Y的值。下表为橡皮筋受到的拉力F与伸长量x的实验记录,请在图乙中作出F—x图象.
| 拉力F/N |
5.0 |
10.0 |
15.0 |
20.0 |
25.0 |
| 伸长量x/cm |
1.60 |
3.20 |
4.80 |
6.40 |
8.00 |
(2)由以上实验可求出该橡皮筋的K值为___________N/m(保留两位有效数字)。
(3)某同学在家中用三根相同的橡皮筋(遵循胡克定律)来探究合力的方法,如图所示,三根橡皮筋在O点相互连接,拉长后三个端点用图钉固定在A、B、C三点。在实验中,可以通过刻度尺测量橡皮筋的长度来得到橡皮筋的拉力大小,并通过OA、OB、OC的方向确定三个拉力的方向,从而探究求其中任意两个拉力的合力的方法。在实验过程中,下列说法正确的是()
A.只需要测量橡皮筋的长度,不需要测出橡皮筋的原长
B.为减小误差,应选择劲度系数尽量大的橡皮筋
C.以OB、OC为两邻边作平行四边形,其对角线必与OA在一条直线上且长度与OA相等
D.多次实验中即使O点不固定,也可以探究求合力的方法
为了测量玩具遥控汽车的额定功率,某学习小组用天平测出小车质量为0.5 kg,小车的最大速度由打点计时器打出的纸带来测量(如图所示)。主要实验步骤有:
A. 给小车尾部系一条长纸带并让纸带穿过打点计时器;
B. 接通打点计时器电源(电源频率50 Hz),使小车以额定功率沿水平地面直线加速到最大速度,继续运行一段时间后关闭小车发动机,使其沿地面直线向前滑行直至停止;
C. 学习小组分析后选择了认为符合要求的一段纸带,从某点开始每5个连续点标为一个记数点,并将表示每两个相邻记数点间距离的字母和测量数据在纸带上做了记录。(所有结果均保留2位有效数字)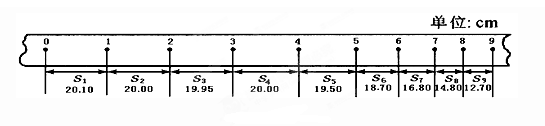
① 相邻两记数点间的时间间隔T = ______s,由纸带知遥控汽车的最大速度为 =_________m/s;
=_________m/s;
② 实验小组在计算关闭发动机后的遥控汽车滑行过程的加速度时,选择了纸带上后5段数据,经过分析又舍掉了一段不合理数据。请你判断哪段数据不合理_________ (用字母表示),舍掉了不合理数据后加速度的计算表达式为 ="_________" (请用时间间隔T及纸带上表示记数点间距离的字母表示),计算出的加速度大小为______m/s2;
="_________" (请用时间间隔T及纸带上表示记数点间距离的字母表示),计算出的加速度大小为______m/s2;
③ 遥控汽车滑行过程的阻力大小为 =_________N,其额定功率
=_________N,其额定功率 =_________W。
=_________W。
在测量电源的电动势E以及内阻r(电动势约2V,内阻约0.5Ω实验中,给出如下器材:
量程为1V的电压表,量程为0.5A的电流表(内阻较小),定值电阻R0 = 1.6Ω,滑动变阻器R,开关S,导线若干。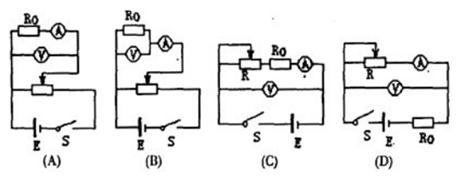

(1)四位同学设计了如上四个电路,实验电路应选为( )
(2)实验时当电流表的示数为I1时,电压表示数为U1;当电流表的示数为I2时,电压表示数为U2,则可求出电动势E的字母表达式为_____,内电阻r的字母表达式为_______
(3)根据测量实验记录数据画出了电压表示数U随电流I的变化关系U—I图象,如图所示,由此可知电源电动势E=_____、内阻为r=______。(结果在小数点后保留两位小数)
某兴趣小组在一次实验中需测量一只量程已知的电压表的内阻,现提供如下器材:
①待测电压表一只(量程3V,内阻约3kΩ待测);
②电流表一只(量程3A,内阻0.01Ω);
③电池组(电动势约为3V,内阻不计);
④滑动变阻器一个;
⑤变阻箱一个(可以读出电阻值,
0-9999Ω);
⑥开关和导线若干。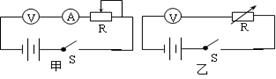
某同学利用上面所给器材,进行如下实验操作:
(1)该同学设计了如图甲、乙两个实验电路。为了更准确地测出该电压表内阻的大小,你认为其中相对比较合理的是(填“甲”或“乙”)电路。
(2)用你选择的电路进行实验时,闭合电键S,改变阻值,记录需要直接测量的物理量:电压表的读数 和 (填上文字和符号);
和 (填上文字和符号);
(3)为方便计算电压表的内阻,需作出相应的直线图线,请从下面选项中选择适当的坐标轴,
A. |
B. |
C. |
D. |
(4)设该直线图像的斜率为 、截距为
、截距为 ,则用、表示出的电压表内阻的表达式
,则用、表示出的电压表内阻的表达式 =。
=。