如图所示是小明和小聪同学“探究平面镜成像特点”的实验情景。
(1)根据他们在实验过程中的对话,可以判断小明所看到是 像,这个像 (填“是”或“不是”)实际光线会聚成的。
(2)他们确定了像的位置后,小聪拿出一只没有点燃的相同的蜡烛,放在玻离板后面移动观察到了蜡烛和像完全重合,说明 。
(3)他们开始实验时,把玻璃板摆放在水平桌面上,摆放的要求是 ,否则会出现的问题是 。
在车站广场上,常常看见人们将旅行包 平放在拉杆箱 上,如图甲所示。假设作用在箱子上的水平推力, , 、 一起做匀速直线运动。
(1)将旅行包 看成一个有质量的点,如图乙所示。请在图乙中画出运动过程中 的受力示意图;
(2)若 内箱子运动的距离为 ,求力 做功的功率。

一小灯泡额定电压为 ,图 是测量其电阻的实验电路图。

(1)请按照图 ,将图 中的实物电路连接完整;
(2)闭合开关,调节滑动变阻器,当电压表示数为 时,小灯泡正常发光,电流表示数如图 所示,则此时通过小灯泡的电流为 ;
(3)调节滑动变阻器,让小灯泡两端的电压逐渐减小,会发现灯泡变暗直至完全不发光。可以猜想此过程中灯丝的温度 (选填"升高"、"不变"或"降低" ;
(4)测量数据如下表所示。
|
电压 |
2.50 |
2.10 |
1.70 |
1.30 |
0.90 |
0.50 |
|
电流 |
0.26 |
0.24 |
0.21 |
0.19 |
0.16 |
分析表中数据,可以发现小灯泡两端的电压越低,其灯丝的电阻越 。
实验室用的托盘天平,砝码盒中常配备的砝码规格有: 、 、 、 、 。现要测量一物体的质量(约为 。
(1)调节横梁平衡:将天平放在水平桌面上,取下两侧的垫圈,指针就开始摆动。稳定后指针指在分度盘的位置如图甲所示。则接下来的调节过程为: 。

(2)调节天平横梁平衡后,将物体放在左盘中,用镊子由大到小在右盘中加减砝码 ,当放入 的砝码时,指针偏向分度盘的右侧,如图乙所示。则接下来的操作是 ,直到横梁恢复平衡。
在探究"什么情况下磁可以生电"的实验中,实验装置如图所示。
(1)实验现象:
①保持蹄形磁体位置不动,让导线 在磁场中静止、竖直向上或向下运动,电流表的指针均不发生偏转;
②导线 向左或向右运动,电流表的指针发生偏转;
③保持导线 不动,让蹄形磁体向左或向右运动,电流表的指针发生偏转。
实验结论:闭合电路的一部分导体在磁场中做 运动时,导体中就会产生感应电流。
(2)实验现象:
①保持磁场方向不变,导线 向右运动时,电流表指针向左偏转;导线 向左运动时,电流表指针向右偏转。
②对调磁体两极的位置。使磁场方向发生改变,导线 向右运动时,电流表指针向右偏转;导线 向左运动时,电流表指针向左偏转。
实验结论:感应电流的方向与 有关。

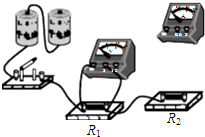
某兴趣小组为探究串联电路中总电阻与分电阻的关系,在拓展课中做了如下实验:
【实验步骤】
①按方案连接电路,闭合开关,用电流表测出电路中的电流,并记录;
②用电压表分别测出 、 两端电压以及 和 两端总电压,并记录;
请你用笔画线代替导线,将电流表接入如图电路中。
【数据处理】
①在数据处理时,有同学发现表中的一个数据有误,错误的数据是 ;
②重新测量,根据所测的数据计算 、 和 的值。
记录表:
|
电流 |
电压 |
电阻 |
|
|
|
0.2 |
2 |
|
|
|
0.2 |
5 |
|
|
|
0.2 |
3 |
【得出结论】串联电路的总电阻等于各分电阻之和。
【交流表达】科学研究有时需要等效替代的方法,如在某实验中需要用到 的电阻,现有阻值为 、 、 的三个电阻,就可以选用其中的 两个电阻串联替代。