如图所示,F1、F2为有一定夹角的两个力,L为过O点的一条直线,当L取什么方向时,
F1、F2在L上分力之和为最大( )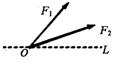
| A.F1、F2合力的方向 |
| B.F1、F2中较大力的方向 |
| C.F1、F2中较小力的方向 |
| D.以上说法都不正确 |
下列说法正确的有()
| A.能量量子化就是指微观粒子的能量值只能是正整数的倍数 |
| B.量子化就是指不连续性,指物理量变化时不能连续变化,只能取分立的值 |
| C.光的波粒二象性是指光既不是普通的波,也不是实物粒子,而是一种特殊物质,它的特殊性表现在既具有波的性质,同时又具有粒子的特点 |
| D.原子发光的光谱是一系列不连续亮线组成的线状光谱 |
在演示光电效应的实验中,把某金属板连在验电器上.第一次用弧光灯直接照射金属板,验电器的指针张开一个角度.第二次在弧光灯与金属板之间插入一块普通玻璃板,再用弧光灯照射,验电器指针不张开.由此可以判定,使金属板产生光电效应的是弧光灯中的()
| A.可见光成分 | B.紫外线成分 |
| C.红外线成分 | D.上述三种均正确 |
对光的认识,应该是()
| A.光的波动性是光子本身的一种属性 |
| B.光在表现出波动性时,就不再具有粒子性了 |
| C.光在表现出粒子性时,就不再具有波动性了 |
| D.光的波粒二象性只是一种假设,还没有被实验事实所证实,因此不能定论 |
某广播电台的发射功率为10 kW,所发射的电磁波在空气中的波长为187.5 m,试求:
(1)该电台每秒钟从天线发射多少个光子?
(2)若发射的光子在各个方向是均匀的,求在离天线2.5 km处,直径为2 m的环状天线每秒接收的光子个数是多少?接收功率为多大?
功率为100 W的灯泡所放出的能量有1%在可见光范围内,它每秒内放出可见光子的数目为多少?(设可见光的平均波长为0.5 μm)