如图所示,机器人海宝按照以下程序运行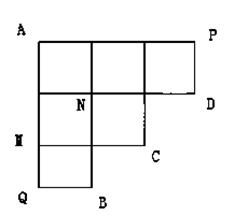
1从A出发到达点B或C或D,到达点B、C、D之一就停止;
②每次只向右或向下按路线运行;
③在每个路口向下的概率 ;
;
④到达P时只向下,到达Q点只向右.
(1)求海宝过点从A经过M到点B的概率,求海宝过点从A经过N到点C的概率;
(2)记海宝到点B、C、D的事件分别记为X=1,X=2,X=3,求随机变量X的分布列及期望.
在△ 中,
中, 是角
是角 对应的边,向量
对应的边,向量 ,
, ,且
,且 .
.
(1)求角 ;
;
(2)函数 的相邻两个极值的横坐标分别为
的相邻两个极值的横坐标分别为 、
、 ,求
,求 的单调递减区间.
的单调递减区间.
已知关于x的不等式 (其中
(其中 ).
).
(1)当 时,求不等式的解集;
时,求不等式的解集;
(2)若不等式有解,求实数 的取值范围
的取值范围
在平面直角坐标系中,曲线C1的参数方程为 (a>b>0,
(a>b>0, 为参数),以Ο为极点,x轴的正半轴为极轴建立极坐标系,曲线C2是圆心在极轴上且经过极点的圆,已知曲线C1上的点M
为参数),以Ο为极点,x轴的正半轴为极轴建立极坐标系,曲线C2是圆心在极轴上且经过极点的圆,已知曲线C1上的点M 对应的参数=
对应的参数= ,
, 与曲线C2交于点D
与曲线C2交于点D
(1)求曲线C1,C2的方程;
(2)A(ρ1,θ),Β(ρ2,θ+ )是曲线C1上的两点,求
)是曲线C1上的两点,求 的值。
的值。
已知PQ与圆O相切于点A,直线PBC交圆于B、C两点,D是圆上一点,且AB∥CD,DC的延长线交PQ于点Q.
(1)求证:
(2)若AQ=2AP,AB= ,BP=2,求QD.
,BP=2,求QD.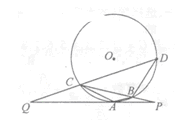
已知函数 是定义在
是定义在 上的奇函数,当
上的奇函数,当 时,
时,  (其中e是自然界对数的底,
(其中e是自然界对数的底, )
)
(1)求的解析式;
(2)设 ,求证:当
,求证:当 时,且
时,且 ,
, 恒成立;
恒成立;
(3)是否存在实数a,使得当 时,的最小值是3 ?如果存在,求出实数a的值;如果不存在,请说明理由。
时,的最小值是3 ?如果存在,求出实数a的值;如果不存在,请说明理由。