某同学利用光电门传感器设计了一个研究小物体自由下落时机械能是否守恒的实验,实验装置如图所示,图中A、B两位置分别固定了两个光电门传感器.实验测得小物体上宽度为d的挡光片通过A的挡光时间为t1,通过B的挡光时间为t2.重力加速度为g.为了证明小物体通过A、B时的机械能相等,还需要进行一些实验测量和列式证明.

(1)下列必要的实验测量步骤是
A.用天平测出运动小物体的质量m
B.测出A、B两传感器之间的竖直距离h
C.测出小物体释放时离传感器B的高度H
D.用秒表测出运动小物体由传感器A到传感器B所用时间△t
(2)若该同学用d和t1、t2的比值来反映小物体经过A、B光电门时的速度,并设想如果能满足 关系式,即能证明在自由落体运动过程中小物体的机械能是守恒的.
在“互成角度的两个力的合成”实验中,用两个弹簧秤分别钩住细绳套,互成角度地拉橡皮条,使它伸长到某一位置 点,为了确定两个分力的大小和方向,这一步操作中必须记录的是()
点,为了确定两个分力的大小和方向,这一步操作中必须记录的是()
| A.橡皮条固定端的位置 |
| B.描下点位置和两条细绳套的方向 |
| C.橡皮条伸长后的总长度 |
| D.两个弹簧秤的读数 |
(2)做实验时,根据测量结果在白纸上画出如图所示的图,其中为橡皮筋与细绳的结点.图中的是 和
和 的合力的理论值;是和的合力的实际测量值。
的合力的理论值;是和的合力的实际测量值。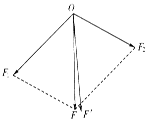
在《探究小车的速度随时间变化的规律》的实验中,利用打点计时器打出了如图所示的一条纸带,其中1、2、3、4、5、6均为记数点,且相邻的两个计数点之间都还有4个点没有画出来,已知电源的频率为50Hz。现测得: s1=1.40cm,s2=1.90cm,s3=2.40cm,s4=2.90cm,s5=3.40cm,s6=3.90cm。
(1)在打点计时器打出点2、3、4、5、6时,小车的速度分别为:
v2=cm/s,v3=cm/s,v4=cm/s,v5=cm/s,v6=cm/s。
(2)在下边的坐标纸上作出速度—时间图象(从1开始计时)。
(3)根据作出的速度—时间图象,求出小车的加速度为m/s2(取二位有效数字)。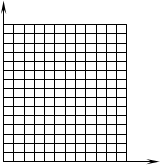
如果打点计时器打出的一条纸带,点迹分布不均匀,那么点迹密集的地方物体运动的速度比较_______ (大,小),点迹不均匀说明物体做_______运动。
有一段粗细均匀的导体,现要用实验的方法测定这种导体材料的电阻率,若已测得其长度和横截面积,还需要测出它的电阻值Rx。
(1)若已知这段导体的电阻约为30Ω,要尽量精确的测量其电阻值,除了需要导线、开关以外,在以下备选器材中应选用的是。(只填写字母代号)
A.电池(电动势14 V、内阻可忽略不计) B.电流表(量程0~0.6 A,内阻约0.12Ω)
C.电流表(量程0~100m A,内阻约12 Ω) D.电压表(量程0~3 V,内阻约3 kΩ)
E.电压表(量程0~15 V,内阻约15 kΩ) F.滑动变阻器(0~10Ω,允许最大电流2.0A)
G.滑动变阻器(0~500 Ω,允许最大电流0.5 A)
(2)在方框中画出测这段导体电阻的实验电路图(要求直接测量的变化范围尽可能大一些)。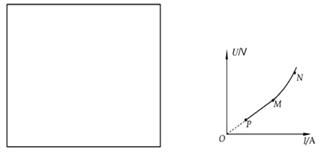
(3)根据测量数据画出该导体的伏安特性曲线如图所示,发现MN段明显向上弯曲。若实验的操作、读数、记录、描点和绘图等过程均正确无误,则出现这一弯曲现象的主要原因是
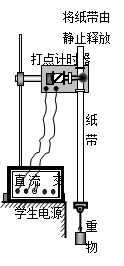
某同学利用如图所示的实验装置验证机械能守恒定律。
(1)请指出该同学在实验操作中存在的错误:。
(2)若所用交流电的频率为50Hz,该同学经正确操作得到如图所示的纸带,把第一个点记做O,第一、第二点间的距离约为2mm,另选连续的4个点A、B、C、D作为测量的点,且 A、B、C、D各点到O点的距离分别为12.29cm、15.55cm、19.20cm、23.23cm。根据以上数据知,从O点到C点,重物的重力势能的减少量等于________J,动能的增加量等于________J。(已知所用重物的质量为1.00kg,当地重力加速度g=9.80m/s2,取三位有效数字) 
(3)重力势能的减少量动能的增加量(填“大于”、“等于”、“小于”)的原因是。