如图所示为一架小型四旋翼无人机,它是一种能够垂直起降的小型遥控飞行器,目前正得到越来越广泛的应用。现进行试验,设无人机的质量为m=4kg,运动过程中所受空气阻力大小恒为f=4N,当无人机在地面上从静止开始以最大升力竖直向上起飞,经时间t=4s时离地面的高度为h=48m,g取10m/s2。求:
(1)其动力系统所能提供的最大升力为多大?
(2)无人机通过调整升力继续上升,恰能悬停在距离地面高度为H=118m处,求无人机从h上升到H的过程中,动力系统所做的功为多大?
(3)当无人机悬停在距离地面高度H=118m处时,突然关闭动力设备,无人机从静止开始竖直坠落,经2s后无人机瞬间又恢复最大升力,则无人机在下落过程中距地面的最低高度为多大?
如图所示,一对光滑的平行金属导轨固定在同一水平面内,导轨间距l=0.5m,左端接有阻值R=0.3Ω的电阻,一质量m=0.1kg,电阻r=0.1Ω的金属棒MN放置在导轨上,整个装置置于竖直向上的匀强磁场中,磁场的磁感应强度B=0.4T,棒在水平向右的外力作用下,由静止开始以a=2m/s2的加速度做匀加速运动,当棒的位移x=9m时撤去外力,棒继续运动一段距离后停下来,已知撤去外力前后回路中产生的焦耳热之比Q1:Q2=2:1,导轨足够长且电阻不计,棒在运动过程中始终与导轨垂直且两端与导轨保持良好接触,求:
(1)棒在匀加速运动过程中,通过电阻R的电荷量q
(2)撤去外力后回路中产生的焦耳热Q2
(3)外力做的功WF
交流发电机矩形线圈边长ab="cd=0.4" m,bc="ad=0.2" m,共50匝,线圈电阻r="1" Ω,线圈在B="0.2" T的匀强磁场中,绕垂直磁场方向的轴OO′以200 rad/s的角速度匀速转动,外接电阻R=7Ω,如图所示。求:
(1)从图示位置开始计时,线圈中产生的感应电动势大小随时间变化的函数表达式;
(2)电压表读数;
(3)电阻R上的电功率。
(9分)如图所示,水平放置的导体框架,宽L=0.5 m,接有电阻R=0.3Ω,整个装置处于垂直框架平面向下的匀强磁场中,磁感应强度B=0.4 T.一导体棒ab垂直框边跨放在框架上,并能无摩擦地在框架上滑动,已知导体棒ab的电阻为 ,框架的电阻均不计.当ab以v=5.0 m/s的速度向右匀速滑动时,求:
,框架的电阻均不计.当ab以v=5.0 m/s的速度向右匀速滑动时,求:
(1)ab棒中产生的感应电流的大小和方向;
(2)维持导体棒ab做匀速运动的外力F的大小。
如图所示的电路中,R2=30Ω,R3=15Ω, S闭合时,电压表V的示数为11.4V,电流表A的示数为0.2A,S断开时,电流表A的示数为0.3A,求: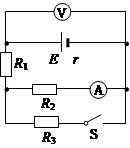
(1)电阻R1的值;
(2)电源电动势E和内阻r的值。
如图所示,在第一象限有一匀强电场,场强大小为E,方向与y轴平行;一质量为m、电荷量为-q(q>0)的粒子以平行于x轴的速度从y轴上P点处射入电场,已知OP=L,OQ=2 L.不计粒子重力.求:
L.不计粒子重力.求:
(1)粒子在第一象限中运动的时间.
(2)粒子离开第一象限时速度方向与x轴的夹角.