无人驾驶飞机简称"无人机",中国近年来在无人机制造方面进展神速。无人机的飞行控制系统简称"飞控"。无人机悬停还是飞行、向哪个方向飞行、上升还是下降等飞行指令都由"飞控"下达。"飞控"主要由感知飞行姿态的陀螺仪(控制飞行姿态)、 定位模块(与地面传递信息)超声波传感器(探测障碍物)、气压传感器(获取气压获知高度)等各种功能的传感器及控制电路组成。如图是我国制造的"翼龙"多用途无人机,该机表面采用的复合材料受力不易形变,飞机外形采用流线型设计,可携带各种侦察、测距、电子对抗设备及小型空对地打击武器,广泛应用于如灾情监视、军事活动等领域。
(1)请从短文描述中找出蕴含的物理知识。(至少二条,知识点不能重复)
举例:超声波传感器可探测无人机在飞行时遇到的障碍物,这是利用声波能够传递信息。
①
②
(2)经查阅资料获知,"翼龙"无人机机身质量 ,最大载荷质量 。当该机以最大载荷质量停在水平跑道上时,无人机轮胎与地面接触的总面积为 .求此时无人机对水平跑道的压强。
(3)飞机利用超声波传感器来判断离地高度。若某测距传感器的阻值
与离地高度
的关系如图甲所示,图乙是检测电路(电源电压不变),要使高度表(实质是电流表或电压表)示数能随飞行高度的增大而增大,则此高度表应该选用 (选填"电流表或电压表"
,应安装在 (选填"1或2或3"
位置,判断依据是: 。 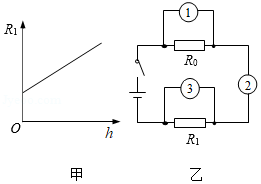

图甲是智能怀旧灯,与灯串联的调光旋钮实质是滑动变阻器,图乙是简化的电路原理图。灯 标有" "字样,当滑动变阻器的滑片 在 点时,灯正常发光, 两端电压不变,不考虑温度对灯丝电阻的影响。问:
(1)灯丝的电阻和 两端电压 是多少?
(2)当滑动变阻器接入电路中的电阻是 时,灯消耗的实际功率是多少?
(3)当滑片 位于中点 和右端 时,灯两端电压之比是 ,则滑动变阻器的最大阻值是多少?

为提高车辆通行质量,福州交警在市区一些道路某些时段推出"绿波通行",即车辆在绿波路段以如图所示的 范围内行驶,一路绿灯。在绿波时段,质量是 的汽车,经过绿波路段上相距 的两个路口,用时 ,问:
(1)汽车行驶的平均速度是多少?是否"绿波通行"?
(2)若汽车在这段距离内行驶的牵引力保持 不变,则汽车的输出功率是多少?
(3)若轮胎与地面接触的总面积是 ,汽车静止时对水平地面的压强是多少? 取

请按下列要求作图。
(1)在图1中画出足球受到重力的示意图。
(2)在图2中画出入射光线经凸透镜后的折射光线。
(3)在图3中标出电源的" "极。

实际测量中使用的大量程电流表是由小量程电流表改装而成的。图中 是满偏电流(即小量程电流表允许通过的最大电流) 的电流表,其电阻 ,图为某同学改装后的电流表电路图, 、 为定值电阻。若使用 和 两个接线柱时,电表的量程为 ;若使用 和 两个接线柱时,电表的量程为 ,求 , 的阻值。

理论上分析:浸在液体中的物体受到的浮力就是液体对物体表面压力的合力。如图所示,一个底面积为 ,高为 的长方形浸没在密度为 的液体中。
(1)分析该物体侧面所受液体压力的合力 ;
(2)求出该物体底面所受液体压力的合力 ;
(3)结合以上结果,说明该理论分析与阿基米德原理的表述是一致的。
