如图1所示,电源电压不变,小灯泡 的额定电压为 ,滑动变阻器 的规格为“ ”。闭合开关,当滑片 置于距左端三分之一处,灯泡正常发光,电流表指针满偏,电表表盘如图2所示。
(1)求灯泡的额定功率和电源电压
(2)用定值电阻 替代小灯泡,再将另一电压表 接入电路,其它部分电路连接不变。闭合开关,当滑片 置于某一位置时,两个电压表指针偏转的角度相同,且表 示数大于表 的示数,两种电表指针偏转角度之比为 .求 可能的阻值。

小红和小芳准备测量一块橡皮的密度。
(1)小红将天平放在水平桌面上,当游码归零后发现指针静止时的指向如图甲,她应将平衡螺母向 调节。测量中,天平平衡时所加砝码和游码位置如图乙,则橡皮质量为 .她继续测出橡皮的体积为 ,橡皮密度为 。
(2)小芳设计了另一方案:
①把橡皮挂在图丙所示的测力计下;
②测出橡皮重力 ;
③将橡皮浸没水中,读出测力计示数 。
则橡皮的密度 的表达式可表示为 。小红认为该方案不能准确测得橡皮密度,理由是 。

据近期新闻报道,南京街头出现了一款智能下水管道机器人(如图甲所示),其上装有摄像头和探照灯,能将水管内拍摄到的影像无线传输至路面的接收装置中(如图乙所示),以便对管道及时检测修补。
(1)摄像头拍射到的影像是通过 传输到地面的。
(2)机器人最大行驶速度为 ,则要通过一段 长的管道,至少需要多长时间?
(3)若机器人的质量为 ,车轮和水平管道地面的总接触面积是 ,则它对管道地面的压强是多少帕? 取

在“测量小灯泡的功率”实验中,小灯泡的额定电压为 。

(1)如图甲是小明测量小灯泡额定功率的实物电路图(不完整)。请用笔画线代替导线将实物电路图连接完整。
(2)闭合开关前,图甲中滑动变阻器的滑片 应位于 (选填“ ”或“ ” 端。
(3)连接好电路后,闭合开关,小明发现移动滑动变阻器滑片 ,小灯泡不发光,电压表的示数为零。进一步观察并检查电路,发现电压表、电流表、导线及其连接均完好。针对电路中出现的小灯泡不发光的故障现象,他提出了如下猜想:①小灯泡短路;②小灯泡的灯丝断了;③滑动变阻器断路。根据故障现象,猜想 (填序号,下同)是错误的。如果观察到电流表有示数,则猜想 是正确的。
(4)排除故障,闭合开关,移动滑动变阻器滑片 到某一位置,电压表示数如图乙所示,此时应将滑片 向
(选填“ ”或“ ” 端移到合适位置,读出电流表示数,即可算出小灯泡的额定功率。
(5)小平打算增加一个阻值为 的定值电阻 ,只利用一只电表,通过图中操作(开关 接“ ”、” ”各一次)来测量小灯泡的额定功率。图丙、丁是她设计的两种不同方案的电路图,则以下判断正确的是 (填字母)。
.两种方案都能 .两种方案都不能
.丙方案能,丁方案不能 .丙方案不能,丁方案能。
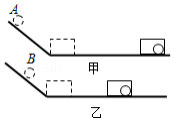
小明利用如图所示的装置来验证影响物体动能大小的因素。甲、乙两图装置相同,分别是同一小球先后从 、 两处由静止滚下,钻入并推动纸盒运动一段距离后静止时的情景。
(1)纸盒被推得越远,小球对纸 越多,表明小球的动能越大。
(2)对比甲乙两图可知,小球的动能与 有关。
(3)若要验证动能大小与另外一个因素的关系,需要添加的一个器材是 。
小明利用气球做了几个物理小实验。
(1)如图甲所示,要使两个气球靠近,应用吸管对准 点(选填“ ”、“ “或“ ” 沿垂直于纸面方向用力吹气。

(2)如图乙所示,将气球皮迅速拉长后,立即贴至额头上,额头感觉到气球皮变热,此现象说明的物理知识是 。
如图丙所示,松开封气球口的夹子,气球向右运动。
①使气球向右运动的力的施力物体是 ;
②以吸管为参照物,铁架台是 的:
③此现象可以说明 (填字母)。
.物体间力的作用是相互的 .力可以改变物体的运动状态
.气体流速越大,压强越小 .内能可以转化为机械能。